Global
Global




































1) 産業用ロボットの構成
産業用ロボットは、主に以下の4つの構成で成り立っています。
- 作業する腕に相当する「マニピュレータ」
- マニピュレータを制御する「ロボットコントローラ」
- 動作のモニタリングをする「プログラミングペンダント」
- マニピュレータとロボットコントローラを接続する「給電ケーブル」
実際の作業をするにあたっては、さらにマニピュレータに取り付けられるハンドや溶接トーチといったツール(エンドエフェクタ)やワークを固定するジグやワークを検出するセンサーなどが組み合わされます。
2-1)マニピュレータとは
マニピュレータは動いて作業する腕に相当するもので、産業用ロボットと聞いてまず想像するものがこれです。マニピュレータは一般的に4つから7つの可動部となる回転軸があり、それぞれサーボモータと減速機がつながれています。当社で一番生産数が多い6つの可動部がある(これを6自由度といいます)マニピュレータの場合は三次元空間上の位置(x,y,z)と姿勢(θx,θy,θz)を動作することができます。6自由度も必要がないパレタイジング用ロボットでは4軸、さらに自由度を必要とする場合は7軸のロボットもあります。
2-2)マニピュレータの種類
2-2-1) 垂直多関節型
6軸垂直多関節ロボット
現在産業用ロボットの主流はこの6軸垂直多関節型です。みなさんがロボットと聞いてまずイメージする形かと思います。汎用性が高く、自動化を検討するときに様々な用途で使えるロボットです。同じ6軸構造でも対象物を持ち上げられる最大の重さ(可搬質量)が500グラムから900キログラムの多彩な種類があります。500グラムの可搬質量のモデルは本体質量が7キログラムと片手でも運べる大きさで、数台組み合わせるとそれぞれが連携して細かい作業を精密に行ってくれます。産業用ロボットは手首から先のツールによって様々な作業をすることができます。


7軸垂直多関節型ロボット
軸数が7軸あると人間の腕に一番近く動けるといわれています。6軸だとマニピュレータが届かないような入り込んだ場所にアプローチする場合でも、もう一軸あるとアームが回り込んで接近することができるので、設備をより小さく高密度で配置ができ、工場のラインレイアウト自由度が高まります。2008年には7軸のアーク溶接ロボットを世界初で製品化しています。

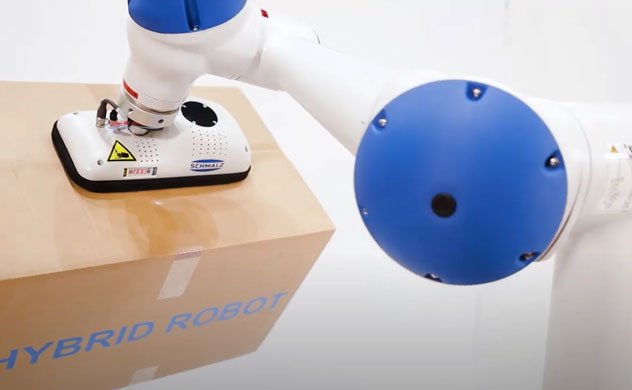
双腕型ロボット
双腕型ロボットの形は人間の上半身のようにも見えますが、実際の人間の腕の動きに近い7軸の両腕に加えて腰の動きの一軸での軸数は15軸あり、ほぼ人間に近い動きをすることができます。つまり工場でいままで人間が行っていた作業を産業用ロボットに覚えさせて代替することができるのです。段ボールへの梱包であれば一方のアームでワークを抑え、もう一方のアームで梱包させるなど、人間の動きに近いことができます。


2-2-2) 水平多関節型(スカラロボット)
スカラはSelective Compliance Assembly Robot Armの頭文字をとって「SCARA」と呼ばれています。軸数は4軸が一般的で、アームが水平方向に旋回する動作と、先端部分が垂直方向に上下する動作を組み合わせた動きをします。構造がシンプルなため高速動作が可能で、先端部分が上下に動作する特長を生かして、プリント基板への電子部品の実装などが得意です。

2-2-3) パラレルリンク
本体から伸びた3本のアームが先端で一体になった構造をしています。ツールはその一体になった部分に取り付けられます。アームそのものを非常に軽量に作ることができるので、高速に動かすことができます。可動領域は狭いですが、各モータが同期して先端を動作させるため、可搬質量に対して、非常に速い「スピード」が得られます。食品工場や中食工場などで多く使用されており、生産ラインで流れてくる製品の整列、充填、締め、包装、箱詰めなどを行っています。

2-3)マニピュレータの構成部品
サーボモータ
ロボットコントローラからの指令によりマニピュレータを動作させます。サーボモータには速度と回転位置を検出するエンコーダが取り付けられており、ロボットコントローラにフィードバックすることで精度の高い動作を実現します。マニピュレータが6軸や7軸といったときは、サーボモータの組み込まれた数と同数ということになります。
減速機
サーボモータの回転速度を減速するとともにトルクをあげてマニピュレータへ伝達します。減速機を経由して出力されるトルクは減速比に比例します。産業用ロボットで使用される減速機は一般的にサーボモータからの入力軸と減速後の出力軸は同一直線状になる構造をしています。減速機の精度はマニピュレータの動作精度も左右する重要な構成部品です。

3)ロボットコントローラ
産業用ロボットを動作させたいプログラムを記録し、具体的に動作させるための指令値を計算するためのCPUや入出力信号を制御するI/O基板、マニピュレータを動作させ電力を供給するサーボドライバが組み込まれた機器はロボットコントローラと呼ばれ“頭脳”といえる部分になります。最近は現場に設置する省スペース化のために、小型化の要望が多く、当社も世界最小クラスとなるYRCシリーズを展開しています。

4)プログラミングペンダント
マニピュレータに作業するための動作を教えたり、プログラムや条件の設定や動作状況の確認をしたりするマン・マシンインターフェースがプログラミングペンダントです。プログラミングペンダントにはデッドマンスイッチと呼ばれるものが装備されており、オペレーターがプログラミングペンダントを正しく握っていないと、産業用ロボットに電源が供給されない仕様になっています。
また、何らかの危険な状態で、オペレーターがプログラミングペンダントを強く握りしめた場合にも産業用ロボットへの電源が遮断される安全に考慮した設計になっています。

5)ツール(エンドエフェクタ)
産業用ロボットの手首に取り付けられるハンドや溶接トーチ、スポットガンなどを総称してツール(エンドエフェクタ)と呼びます。ツール(エンドエフェクタ)は周辺機器メーカーによってあらかじめ準備されているものもありますが、お客さまの作業に合わせて専用に設計・製作されることもあります。
6) ロボットの関連機器(センサーやソフトウェア)
自動化のために導入する産業用ロボットは決められた単純作業を繰り返し行うのが得意です。ただ、更なる作業の自動化と効率化を進めるためには、ロボット自体が判断できるために視覚や力覚といった自律性向上が必要です。そのなかでセンサーとそのソフトウェアの役割はより重要になっています。
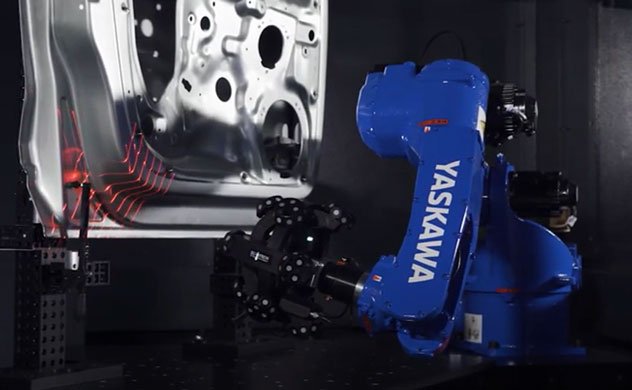
ビジョンセンサー
ビジョンセンサーはカメラ(ビジョン)でワークの位置を検出し、産業用ロボットの動きを補正するシステムです。当社のソフト「MotoSight-2D」は、高さが同じで平面に整列された対象物に対して位置と傾きを検出し、ロボット動作の補正を行います。使用例としてはコンベヤからの金属加工部品のピッキングや検出などがあります。
一方、物流倉庫など高さが異なる対象物のピッキングを行う際には「MotoSight-3D」を用います。これは3Dビジョンセンサーで三次元位置(縦、横、高さおよび傾き)を計測することでバラ積みピッキングなど、乱雑に積まれたワークを上から順にアームで取り出すことができます。従来行っていたように動作に対してスクリプト(コード)を書き込んでいくという作業ではなく、山積みになった部品を撮影して3D CADとマッチングさせることで自動的に動作が生成されるため、作業員による準備は非常に簡単で短時間となります。
力覚センサー
力覚センサーは通常、手首部分とジグの間に取り付けられ、力やモーメントを検出するセンサーです。力覚信号のフィードバックによる組立作業制御に広く使われており、高い精度で精密部品の精密嵌合や研磨、鋳物のバリ取りといった力加減が必要な作業を自動化します。
力覚センサーの検出原理は”ひずみ検出”に基づいています。手首部分に数本のはりや板ばねによってひずみやすい構造の部分を作っておき、そこに6組から8組ほどのひずみゲージを張ります。受ける力を検出し、人の手のような微細な力加減を再現することで人の手でないとできなかった作業の自動化を実現します。当社のソフト「MotoFit」は独自の力制御機能により、隙間が10μmの金属のはめ合いを5秒以内と業界最速レベルで行います。