Global
Global



































-
サーボモータとステッピングモータはどちらも位置決めができる同期モータです。一般的に位置決め精度をそれほど必要とせず、低速で移動距離の短い用途では、ステッピングモータが向いています。
それに対し、高い位置決め精度を必要としたり、移動距離の長い用途や、高速でも高いトルクを発生させたい場合には、サーボモータが力を発揮することができます。ただ、サーボモータを使用する場合、装置の剛性が不十分だと、指令に対しての追従遅れが大きくなります。
一方、ステッピングモータは装置に関わらず、指令に対して高い追従性が得られます。
また、ステッピングモータは構造的にシンプルなため、比較安価ですが、サーボモータは位置検出用エンコーダが必要なため比較的高価です。ただ、ステッピングモータより発熱量が小さく、大幅な省エネ効果が期待できます。それによってランニングコストも削減可能です。
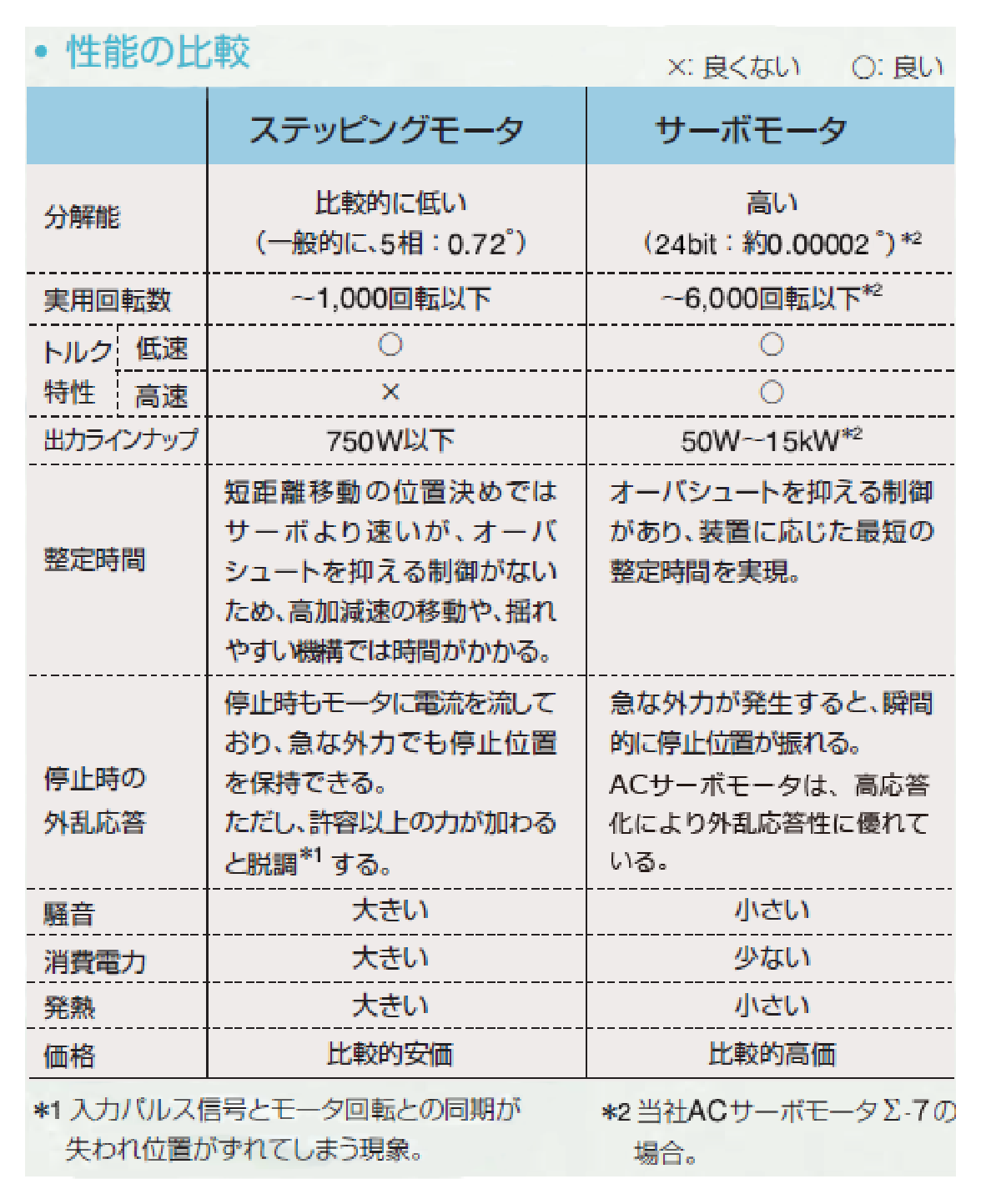
回転仕組みによって分解能が違います。
ステッピングモータの場合、モータ自体に小歯が刻まれており、その小歯に応じた位置決め(ステップ角)運転ができるように設計されています。ドライバ(アンプ)は、コントローラから位置指令として入力されるパルス列信号のタイミングを元に、モータに対して制御信号を生成します。モータは設計されたステップ角(=分解能)で回転します。
しかし、加工精度を要するため分解能には限界があります。サーボモータの場合、モータにエンコーダを搭載し、モータ軸の回転位置や速度をドライバ(アンプ)にフィードバックする仕組みをもっています。ドライバ(アンプ)は位置や速度指令とエンコーダのフィードバック信号(現在位置/速度)の偏差を算出し、常にそれを「0」にするように、モータの回転を制御します。これにより高い分解能を実現します。
制御方式によってトルク特性が違います。
ステッピングモータはエンコーダのような位置検出センサを持たず、ドライバ(アンプ)とモータの間にオープンループ方式で制御されています。そのため、許容以上の外力トルクが軸に加わると脱調してしまいます。
一方、サーボモータはドライバ(アンプ)、モータの間に、常にエンコーダによる位置情報のフィードバックがあるので、クローズドループ方式で制御されています。そのため、許容以上の外力が加わって一時的に位置が変動しても、それを補正し位置決め完了信号などにより状態確認ができます。
また、サーボモータは高速域でも低速域と変わらないトルクを発生することができます。ステッピングモータは、低速域で高いトルクを発生させますが、速度が高くなるにつれてトルクが減少します。
構造によって消費電力や発熱が違います。
ステッピングモータは運転中でも停止中でも常にモータに一定電流を流しています。また、モータの回転速度に応じて損失が大きくなるため、その分消費電力が多くモータの発熱も大きくなります。
一方、サーボモータは偏差に応じた電流しか発生しないので、停止時や一定速度で運転中の電流は小さいため、消費電力が少なくモータの発熱も抑えられます。
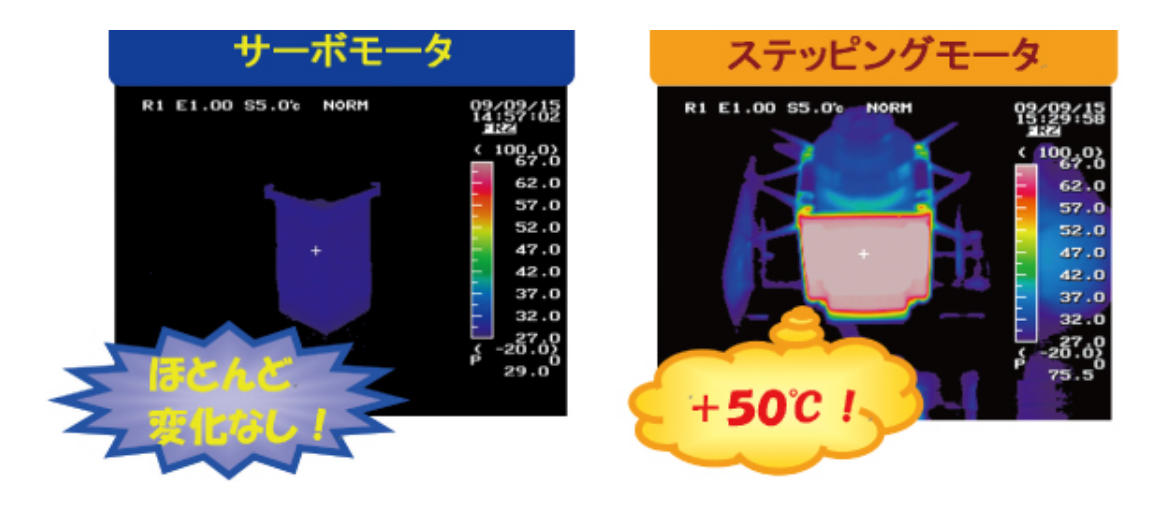
同じ条件で位置決め運転を繰り返し行った場合の発熱、消費電力比較
-
サーボもインバータもモータを制御する装置です。商用電源を電力変換し、電圧(電流)、周波数を制御して、モータを希望どおりの速度で回転させるという基本機能は同じです。お客様から要求される性能、機能によって使い分けます。インバータは、モータの回転数を自由自在に変化させ、安定した動力を供給します。また、従来、上位コントローラで制御していた機能を標準搭載するなど、進化を続けています。更に、1000シリーズインバータはあらゆるモータの制御を実現します。汎用の誘導モータはもちろん、効率のよい同期モータ(PGなし/PG付き)も制御可能です。生活関連機器、社会インフラ設備など皆さまの身近なところから産業機械まで、ワイドな用途で使用されています。更に、ファンやポンプの場合はモータの回転数を調節することで無駄な電力消費を抑え、省エネに貢献します。
一方、サーボは指令された位置、速度に素早く追従させる制御を行います。モータはエンコーダ付きの専用同期モータを制御します。指令された位置、速度に従って、忠実、確実に移動することを得意としており、高速で高精度な位置決めが要求される工作機械や半導体製造装置などに使用されています。
-
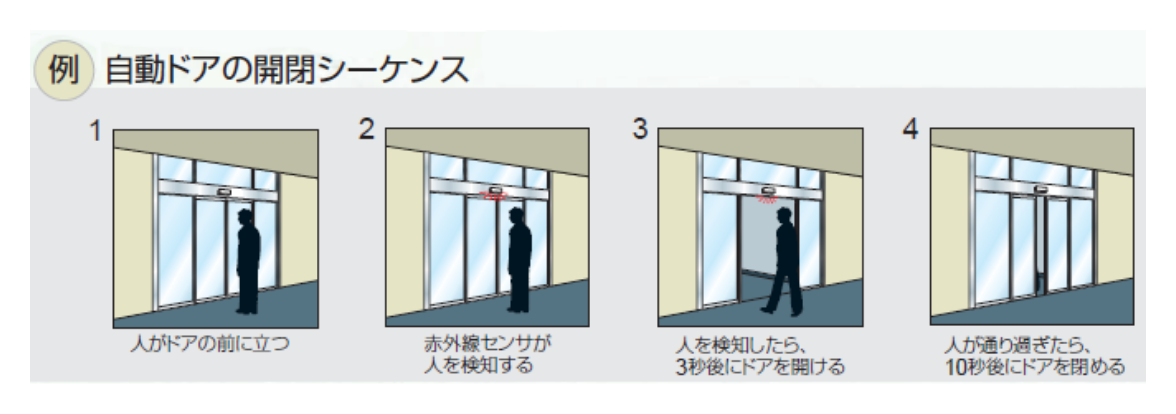
マシンコントローラ(Machine Controller)もPLC(Programmable Logic Controller)も機械を制御するための装置です。PLCは、従来の自動化システムで使われていた電磁リレーの置き換えを目的に誕生し、あらかじめ定められた順序に従って制御を行います。これは「シーケンス制御」と呼びます。
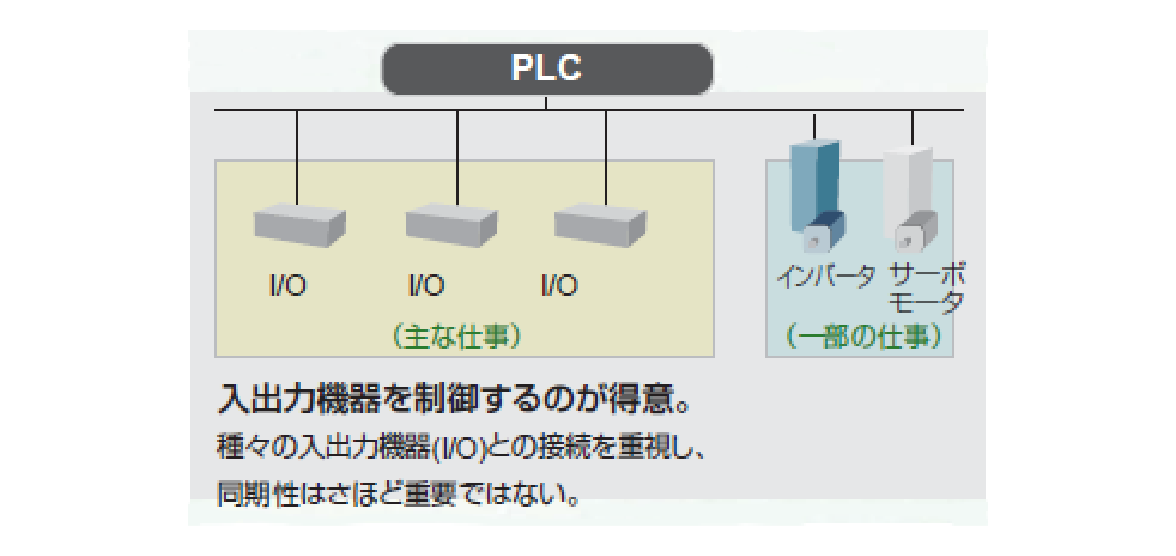
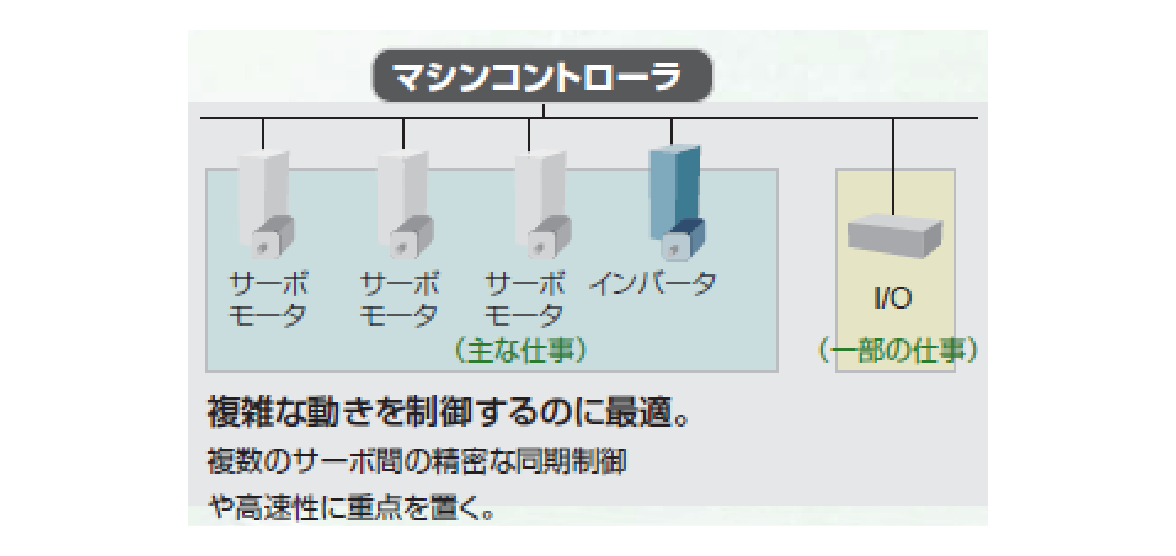
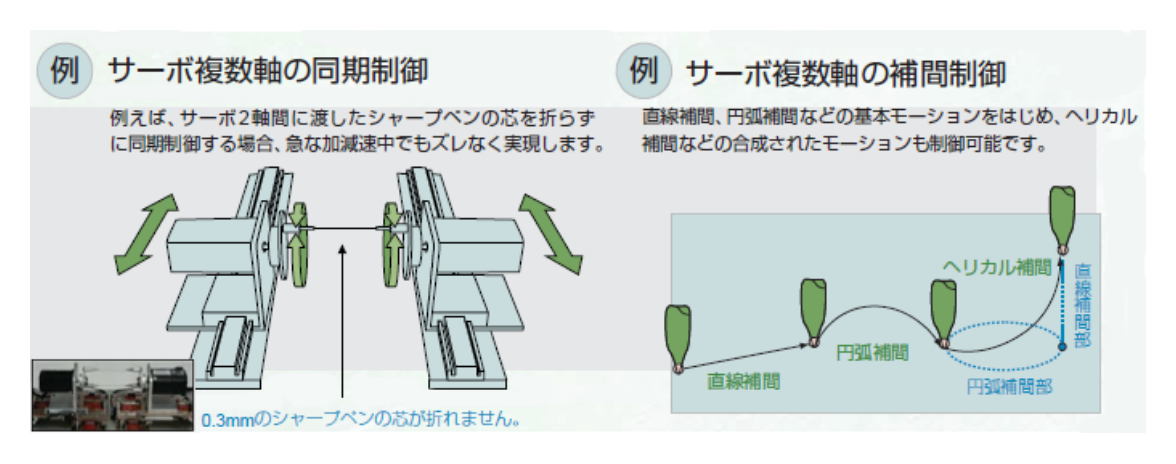
一方、近年、各種機械は高性能化が求められてきました。サーボやインバータを用いて複雑な動きを高速に行う各種装置を制御するために、マシンコントローラが誕生しました。このように、マシンコントローラとPLCは誕生した目的が異なるので、得意とする仕事が違います。マシンコントローラは複雑な動きを高速・高精度に制御することを得意としているのに対して、PLCは入出力(I/O)制御が得意です。

-
-
-
視える化
生産
品質
保全
-
-
-
-
-
-
-
-
 サーボモータをもっと知る
サーボモータをもっと知る

サーボモータが支える産業
みなさまの身近な産業を支えるサーボモータをご紹介します。
サーボモータが活躍するアプリケーション
さまざまなところで活躍するサーボモータのアプリケーションをご紹介します。

サーボモータの種類
お客さまのご要望で「回転型モータ」、「リニアモータ/リニアスライダ」、「リニアモータ」など必要な力(トルク)や機構に応じた幅広いモータをご用意しています。