Global
Global




































産業用ロボットは、みなさんの普段の生活ではあまり目にすることのない工場などで、自動車や家電、パソコンやスマートフォンなどの生産に欠かせない機械として、世界中で270万台以上*が稼働しています。安川電機も1977年に日本で初めて全電気式の産業用ロボットをMOTOMAN(モートマン)というブランド名で販売開始してから50万台強が世界中に出荷されています。
*国際ロボット連盟(IFR)2020年発表値

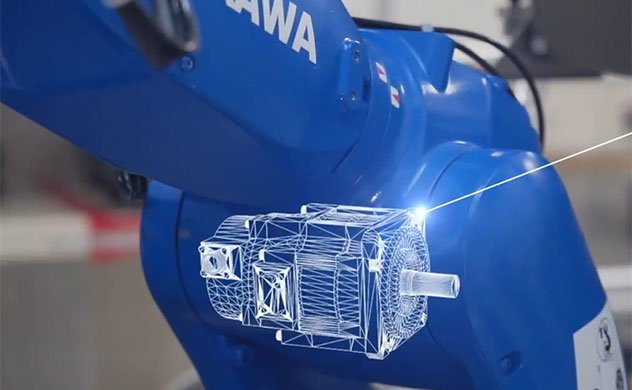
当社では産業用ロボット(MOTOMAN)に組み込まれる主要部品であるサーボモータを自社で開発して最適化しています。この能力を最大限に発揮する制御ソフトウェア技術のほかに、溶接や塗装などの用途に最適な構造や機能を実現するアプリケーション技術などを組み合わせて産業用ロボットを開発しています。
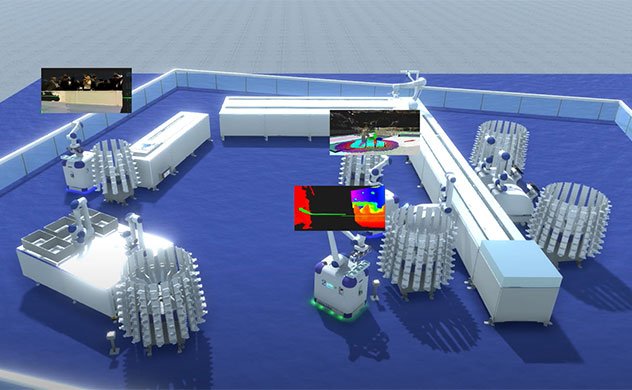
現在のIoTやIndustrie4.0、人工知能(AI)といったトレンドがあるなか、当社は新たな産業自動化革命の実現に対するソリューションコンセプトとして「i3-Mechatronics(アイキューブ メカトロニクス)」を推進しています。当社の産業用ロボットはこのコンセプトを実現する中核となる製品であり、ボディーを構成するサーボモータなどの状態や作業の結果を収集・蓄積・分析することで、お客さまの生産現場における設備やラインの安定稼働による生産性の向上や品質の向上に貢献しています。
安川電機の産業用ロボットは自動車以外にも電気・電子機器、半導体製造、バイオ、食品、医療品、物流など幅広い産業の生産現場で使われています。それでは産業別にどのようなロボットが活躍しているのかご紹介します。
様々な現場で活躍する産業用ロボット






ロボットが適用されているアプリケーション




産業用ロボットの導入事例を見る
製品ラインアップ

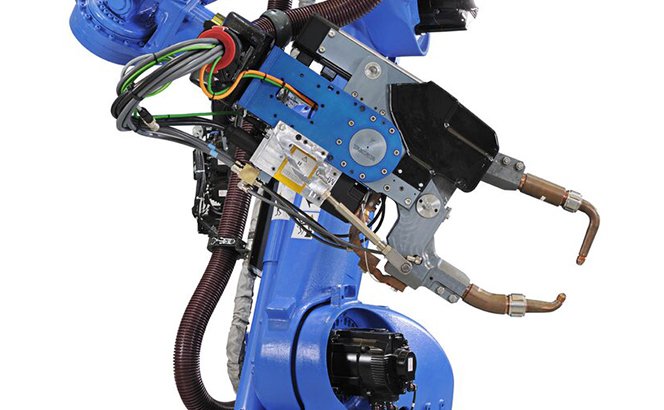
アーク溶接
自動車のマフラーなど部品を中心に点ではなく線でビードをつくるアーク溶接は、安定した溶接のために高い制御技術が求められます。当社はサーボモータを自社開発しているため、アーク溶接による高いビード品質を実現しています。火花がボディーに飛んで表面が焼けてしまうのを防ぐために、スパッタが最小になるようにトーチの角度をAIを搭載して調整するコントローラも用意しています。

スポット溶接
大電流で点で溶接するスポット溶接は手首から先に大型で重量のあるガンを装填するため、大型のロボットアームが必要になります。このスポット溶接は主に自動車のボディーを形成するために使われています。当社のスポット溶接はシミュレーションソフトも充実しており限られたスペースでの近接設置が可能です。

ハンドリング・組立
10キロ以下の可搬質量で小型のロボットですが、生産ラインに組み入れることで、ハンドリングや組立てなどさまざまな工程で使われています。リーチは長くないためモノを高速で左右に移動させることを得意としています。

協働ロボット
協働ロボットとは 
産業用ロボットはこれまで柵のなかでしか作業ができませんでしたが、安全装置が組み込まれた協働ロボットの登場により人の隣で産業用ロボットを設置し、柵を設けるスペースも必要なくなりました。中小企業を中心に操作性など使い勝手を高め直観的に使用できる協働ロボットは市場での活躍の場をどんどん広げています。そして食品などこれまでロボットを使用していなかった分野でも導入が急速に進んでいます。

バイオメディカル
産業用ロボットの活用はバイオメディカルの分野でも進んでいます。例えばゲノム解析、コロナのPCR検査、創薬開発、サルモネラ菌検査などで正確に同じ作業が求めれる工程ではバイオメディカルなどのクリーン環境用に設計されたロボットが活用されています。

パレタイジング
産業用ロボットを使ったビール缶ケース、洗剤ボトル、卵搬送などのパレタイジングの使い方はお客さまのご要望に応じて無限大にあります。最近普及が急速に増えてきた食品や医薬品といった一般産業で自動化するさいに求められるのは、繰り返し精度高く仕事をするこのロボットで当社の主力製品の一つです。

プレス間ハンドリング
自動車のボディのプレス工程は、重くかつ幅広でエッジが鋭利な鉄板の搬送となり、産業用ロボットによる自動化と効率化が早い時期から求められてきました。当社では高い生産性をもつモデルをご用意しています。

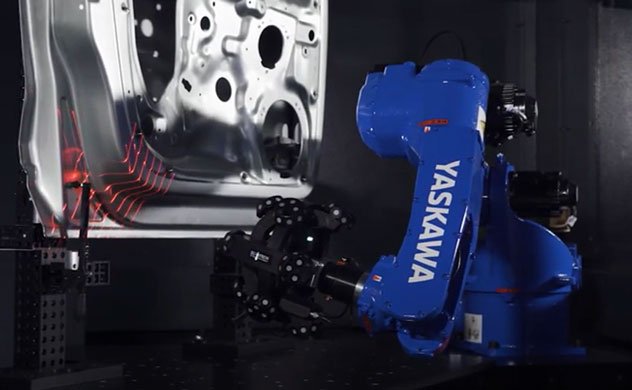
シーリング・切断・レーザ加工
自動車の生産工程におけるシール材の塗布、板金のレーザー加工では、専用の治具を使って、同じ精度の製品が製造されています。特にこの品質を高めるために、塗布したり照射した軌跡や量・移動スピードはデジタル化して生産改善に繋げることができます。

バリ取り・研磨
金属を切断したときに、切断面にバリが発生しますが、これを一つ一つ人の手でバリ取りして表面を整えるのは作業として大変です。金属片が飛ぶことや品質を一定に保つためにバリ取り用の産業用ロボットが導入されています。

塗装
自動車・二輪車のボディのペイントの需要から始まり現在は、家電や小物のペイントなど多くの領域でペイント用の産業用ロボットが使用されています。自動車の高級ラインでは塗料に厚みを持たせるために何度も吹き付けますが、塗布が均一になるような技術が必要です。当社が得意としているアプリケーションの一つです。

液晶ガラス・パネル輸送
液晶ガラス基板搬送のアプリケーションは、水平多関節形による大型でごく薄いテレビやパソコン、スマホなどの液晶基板の搬送に加えて、搬送物の自由な姿勢変換が可能な垂直多関節形も揃えて、人ではできない搬送作業を行うことができます。

半導体ウエハ、有機EL、液晶・太陽電池用ガラス搬送
半導体シリコンウェハーは300mmのサイズが主流ですが、これを高速搬送し、かつ超高精度での繰り返し精度が求められるのが半導体ウエハーの搬送工程です。当社では高精度・低振動を追求してDDモータでダイレクトドライブ駆動方式を採用したモデルを投入し、0.05mmの絶対位置精度や±0.025mmの繰返し位置決め精度のお客さまの要求にお応えしています。