
 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト
i3-Mechatronics
(アイキューブメカトロニクス)
 サーボモータ
サーボモータ
- サーボモータとは
- カタログ・仕様 など
 インバータ
インバータ
- インバータとは
- カタログ・仕様 など
 産業用ロボット
産業用ロボット
- 産業用ロボットとは
- カタログ・仕様 など
















 財務・業績
財務・業績
ニュース・制作物
本社・施設見学
資材調達
ソリューションコンセプトサーボモータ
インバータ
産業用ロボット
財務・業績
| キーワード | Easy to Use,品質向上,サーボ,コントローラ,ロボット,食品 |
| 関連製品 | 食品仕様ロボットMOTOMAN-GP8,MOTOMAN NEXT,植物工場システム アグリネ |
2025年11月18日
食品産業界では、食品の安全、安定供給、フードロスの削減が恒常的に求められています。加えて、食品の生産現場では、労働力の確保、生産性の向上といった課題があります。
当社は、長期経営計画「2025年ビジョン」に基づき、ソリューションコンセプトi3-Mechatronics※1のもと、自動化にデジタルデータ活用を加えたソリューションの進化を続け、これらの課題解決に取り組んでいます。
2025年6月に開催されたFOOMA JAPAN 2025では、特に“食品現場でのEasy to Use” と “スマート工場化”による食品製造工程の課題解決を提案しました。本レポートでは、食品仕様ロボット「MOTOMAN-GP8」を用いた自動化セル、自律性を備えたロボット「MOTOMAN NEXT」を用いた自動化セル、株式会社FAMS※2の植物工場システム「アグリネ」の展示を通して、安川グループのソリューションを解説します。
※1 ソリューションコンセプトi3-Mechatronics
「新たな産業自動化革命の実現」に向け、これまでのソリューションにデジタルデータのマネージメントを加えた新たなソリューションコンセプト。
※2 株式会社FAMS
当社グループ会社。Food & Agriのお客さまへメカトロニクスの力で創造したソリューションを提供。
このデモ機では、以下のような食品生産現場の課題・ニーズに応えるソリューションを紹介します。
1)現場にロボットの専門知識を持ったエンジニアが必要
2)人や検査機による作業結果の確認が必要
3)ロボットの衛生を確保するために多くの時間が必要

図1 蓋閉め自動化セル
特殊表面処理をするなどサニタリー性を向上させた食品仕様ロボット「MOTOMAN-GP8」を活用し、総菜容器の蓋閉め工程を自動化しました(図1)。セル内に投入された容器に、ロボットのアームに装着されたハンドで蓋を把持し取り付けます。6軸垂直多関節ロボットの特長を生かし、容器の形状や蓋の構造に応じた柔軟な動きで角度を調整しながら蓋閉めを自動で実施します。さらに、ハンドから取得したトルクや位置データを活用し、蓋閉めの状態をロボット自身が全数検査します。これにより、人や検査機がロボットの作業結果を確認する必要がなくなります。
MOTOMAN-GP8を使った蓋閉め自動化セルの特長は以下です。
操作パネルで設定した容器の品種とサイズに合わせてロボットコントローラ内で詳細な位置を計算して蓋閉めの動作を行います。また、異常時の復旧や蓋閉め動作のリトライなどの機能をロボットに実装しています。容器や具材の個体差などを除き、蓋閉め成功率はほぼ100%を実現しました。
ロボットハンドに当社製サーボモータを搭載し、その高い電流制御の周期や分解能を生かしてトルクや位置データを取得することで、蓋閉め状態をロボット自身が全数自動検査できます。
蓋の押圧時に測定されたデータを、過去の正常な蓋閉め動作のデータ(比較用データ)と照らし合わせて、ずれがあるかを確認します。「正常な範囲」を定義することにより、ばらつきやタイムラグを抑え、より高精度な判定が可能になります。蓋閉め不良があれば、ロボットがリトライし、リトライでも蓋閉めできないときはロボットが指示して後工程で除外します。
これにより、人や検査機がロボットの作業結果を確認する必要がなくなります。
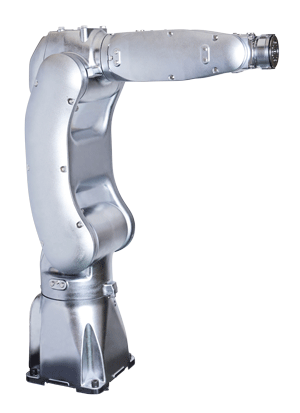
図2 MOTOMAN-GP8(食品仕様)
「MOTOMAN-GP8食品仕様」はロボット単体として高いサニタリー性を向上させています(図2)。
衛生対応の一部を以下に示します。
・防じん・防滴構造(IP67)
・防錆・耐薬品性表面処理を実施
・新しい食品機械用潤滑剤を採用
(使用温度範囲0~45℃、包装前工程の工場における低温環境下に対応)
・ケーブル等の内部配線・配管による異物混入リスク低減
さらに、デモでは株式会社アイキューブデジタル※3のソリューションである生産ライン・装置内の稼働情報を収集するYʻs-SF Equipとリアルタイムでデータ連携して展示しました。また、YRMコントローラ※4とYASKAWA Cockpit※5を活用し、各工程のデータを連携し時間軸の合ったデータを分析することで、i3-Mechatronicsのデータ活用事例としてご紹介しました。
※3 株式会社アイキューブデジタル
当社グループ会社。生産現場の自動化、最適化を実現するデジタルシステムインテグレータ。
※4 YRMコントローラ
複数の装置や産業用ロボットなどで構成された「セル」を統合的に制御するコントローラ。
※5 YASKAWA Cockpit
データの収集・視える化、蓄積・解析を一括して行うソフトウェアツール。
このデモ機では、以下のような食品生産現場の課題・ニーズに応えるソリューションを紹介します。
1)現場にロボットの専門知識を持ったエンジニアが必要
2)ワークの個体差や配置のばらつきへの柔軟な対応が必要

図3 MOTOMAN NEXTによるデモンストレーション
自律ロボット「MOTOMAN NEXT」で、オムライスへのケチャップのトッピング作業をイメージしたデモを実施しました(図3)。タブレット上に手書きで描いた軌跡をロボットが読み込み、動作を自動生成します。コンベヤに流れてくるワークをカメラで検出し、タブレットで指示された軌跡通りにロボットがトッピング動作。ワークの向きや位置が変わっても、高い再現性で高品質の作業を完遂します。
MOTOMAN NEXTを使ったトッピング自動化セルの特長は以下のとおりです。
MOTOMAN NEXTの機能を活用し、ティーチング不要のアプリケーションを構築しました。タブレット上のワーク画像と手書きで描いた軌跡をロボットが読み込み、動作を自動生成します。現場にロボット操作の専門知識を持ったエンジニアがいなくても、タブレット上で作業指示を行うことができ、段取り替えや品種登録などの設定作業が可能です。
ワークの個体差、向きや位置のばらつきにも、ロボット自身が判断して動作を完結します。実際の食品製造では、ワークの形状や大きさにばらつきがあるのが一般的です。AIを活用することで、こうした個体差を認識し、柔軟に対応できます。さらに、トッピング前の具欠や焦げなど品質の良否を判定し、品質NGのワークにはトッピングしないということも可能です。
「MOTOMAN NEXT」は以下のような特長を持つ自律ロボットです。多様化するものづくりにおいて、それぞれの現場に合ったアプリケーションを構築することができます。
① 自律性の実現
MOTOMAN NEXTの自律制御ユニットにはGPUが搭載されており、リアルタイムでAI処理が可能です。これにより、ロボットは周囲の環境を自ら認識し、動作計画することで、状況に応じた柔軟な行動を実現します。
② オープンプラットフォームの採用
MOTOMAN NEXTはオープンプラットフォームとなっており、お客さま、パートナーさまの知見やノウハウを生かしたロボットアプリケーションを構築いただけます。アプリケーション開発に必要なセンシングや認識、動作計画などの基本機能を備え、ロボットメーカー特有の言語知識不要で、C++やPythonといった一般的なプログラミング言語で開発できることが特長です。
気候変動に伴う野菜の安定供給への影響により、植物工場への期待が高まっています。一方で、植物工場も人件費、エネルギー費の高騰など採算性向上が課題になっています。採算性向上のために、野菜の生育日数短縮など様々な機器を活用する研究はあるものの、実証が加速できていないのが現状です。
植物工場システム「アグリネ」は、FAMS本社(新潟県見附市)に長さ25mの実証施設を設置し、様々な野菜の栽培実証を行っています。レタスだけでなく、バジル、セロリ、エディブルフラワーなどの栽培実証も行いました。
通常のレタスが1株70~120gであるのに対し、可食部の多い1株200g以上の大株品種で、一般的な水耕栽培の平均栽培日数と同等の45日を達成しました。
お客さまが求める野菜を、自動化し細菌数も管理した実証設備で、データを活用した栽培実証を進めることで、植物工場システムの採算性向上に取り組んでいます。図4に栽培実証した野菜の例を示します。

図4 アグリネの栽培実証例
植物工場システム「アグリネ」の特長は以下のとおりです。
「アグリネ」は、野菜1株を1つの栽培コマで管理するコマ&レール方式により、播種から収穫まで自動化しています。成長とともに栽培コマを移動させ、端にある野菜搬送装置で、発芽不良や成長しない苗の間引き、野菜の成長に合わせたコマ間の間隔調整を1コマ単位で自動で行います。
栽培環境を最適に制御するアグリネコントローラ(図5)が、温度、湿度、光、CO2濃度、肥料濃度等の栽培環境の制御を行います。生育不良がないか等、生育状況のデータを収集・解析し栽培条件の変更を行います。

図5 アグリネ全景とアグリネコントローラのイメージ
消費者の嗜好が多様化する中、食品製造も他の製造業と同様に、市場ニーズに応じた多様なものづくりが求められています。個体差が大きく種類も豊富な食品の製造は、これまで主に人手に頼って行われてきました。
しかし、ロボット技術の発展に加え、データ活用やAIの導入により、従来は自動化が難しかった工程にもソリューションを提供できるようになりました。安川グループは、独自のコア技術を結集し、多様化する食品製造の現場に対応したフレキシブルな生産システムの構築や、生産性と品質の継続的な向上を支援してまいります。
![]()

Copyright © 2003‐2026 YASKAWA ELECTRIC CORPORATION.









