
 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト
i3-Mechatronics
(アイキューブメカトロニクス)
 サーボモータ
サーボモータ
- サーボモータとは
- カタログ・仕様 など
 インバータ
インバータ
- インバータとは
- カタログ・仕様 など
 産業用ロボット
産業用ロボット
- 産業用ロボットとは
- カタログ・仕様 など
















 財務・業績
財務・業績
ニュース・制作物
本社・施設見学
資材調達
ソリューションコンセプトサーボモータ
インバータ
産業用ロボット
財務・業績
2023年1月31日
生産現場では、3K職場の敬遠や少子化による人手不足が進むなか、更なる生産性や競争力の向上に向けて産業用ロボットの活用が進んでいます。しかし、全ての生産現場において、産業用ロボットの活用が進んでいるわけではありません。例えば、高いスキルを有する熟練技能者が支える工程などでは、ロボット導入への期待に反し、ロボット化は進んでいません。当社はこのようなロボット活用が困難な工程へのロボット化にも挑戦しています。
今回、樹脂や金属面の研磨工程におけるロボット化として、実演教示の取組みを紹介します。

研磨作業をロボット化するには、「現場に研磨作業を熟知したうえで、ロボットも扱える人はなかなかいない」、「押付け加減も含めたロボットティーチングは難しく、非常に時間がかかる」といった課題があり、一部ロボット化を進めている加工メーカーはあるものの、教示に時間がかかるため、多品種に対応するのは難しいのが実情です。これらの課題を解消し、よりロボットの導入障壁を低減するため、直感的に操作でき、動きと同時に力加減も教示できる実演教示パッケージMOTOMAN-Craftを開発し、2022年11月に製品化しました。
本開発は、研磨用途へのロボット化への挑戦であり、ロボット業界での最先端の取組みです。
特に、教示デバイスは、熟練技能者の動きと力加減を忠実に再現できる、これまでにない研磨作業の自動化をサポートする教示ツールです。
開発機種 実演教示パッケージMOTOMAN-Craftのシステム構成を図1に示します。
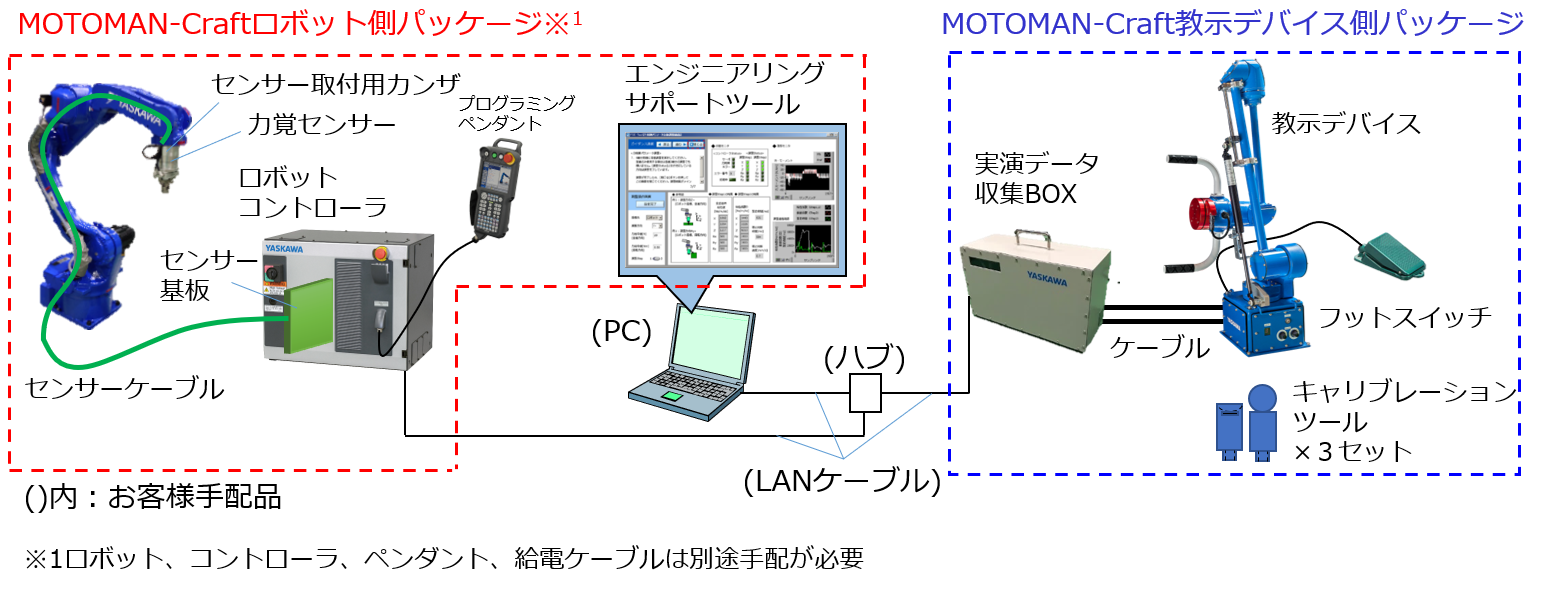 図1 MOTOMAN-Craftシステム構成
図1 MOTOMAN-Craftシステム構成

図2 教示デバイスの操作の様子

図3 教示デバイス 運搬姿勢
専用の教示デバイスで操作者が作業を実演し、ロボットが動作できるプログラムに変換します。繰返し学習制御により教示デバイスで操作した際の動きと力加減をロボットは忠実に再現することができます。教示デバイスは複数のロボットに使いまわすことができ※2、各ロボットの近くに設置して、それぞれのワーク品種に応じた作業を各ロボットに教示して回ることで、操作者と同じ品質の作業が可能なロボットを短期間で複数立ち上げることが可能です。
※2 適用するロボットコントローラには実演教示ソフトがロードされている必要があります。
研磨作業はまだまだ人手に頼っている工程であり、ワークの曲面形状に合わせた3次元的な軌道と力加減をロボットに教示することが困難です。そこで、操作者の動きと力加減をセンシングし、その動作をロボットで再現する機能を開発しました。
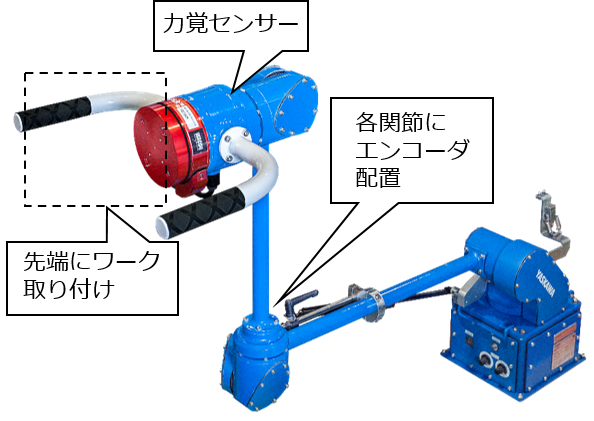
図4 教示デバイス
以前から人の動きをトレースする技術としては、光学式や磁気式などのモーションキャプチャがあります。また、アーム型の3次元測定器も存在します。しかし、研磨作業へ適用するにあたっては、「周辺装置があり、計測器の置ける場所が限られている(複数台のカメラを配置できるスペースはない)」、「研磨機に押し当てるので耐振動性が必要」、「粉塵が舞う環境であるため、防塵性が必要」といった条件を満たす必要があります。こうした条件を満たすため、限られたスペースで計測できるアーム型とし、図4のように教示デバイスの各関節にはエンコーダ、先端部には6軸力覚センサーを配置しました。また、現場環境を想定した振動試験、防塵試験で
問題ないことを確認しました。研磨作業に耐える専用の教示デバイスで作業者の動作とワークを押し付けた際の力加減を一定周期でセンシングできます。ワークを教示デバイスの先端に取り付けた状態でも研磨作業者の普段の作業に近い操作性を実現しました。
教示デバイスでセンシングした動きを忠実にロボットで再現するためには、教示デバイスとロボットと研磨機のそれぞれの位置関係を正確に求めておく必要があります。これをキャリブレーションと呼びます。通常、キャリブレーション作業では、先端が尖ったツールを使用し、プログラミングペンダントを使用してロボットの位置を微修正しながら目視でツール先端同士を合わせることで実施されていました。その場合位置合せに時間がかかる、ロボットの習熟度によってばらつきがあるという課題がありました。今回、キャリブレーションツールを実演教示パッケージに含め、誰でも簡単にキャリブレーションできるようにしました。キャリブレーションツールは、図5のように一方が球体、もう一方が丸くへこんだ部分に磁石が付いたツールとなっています。これらの先端同士を合わせると、一意に位置が決まります。教示デバイス側とロボット側でワークとキャリブレーションツールの位置関係が同じとなるようにエンドエフェクタに取り付けます (図6)。手順通りに教示デバイスとロボットのキャリブレーションツール同士をくっつける、教示デバイスで研磨機のホイール部に当てて計測することで、ロボットに対する教示デバイスと研磨機の位置関係を正確に求めておくことができます。

図5 キャリブレーションツール
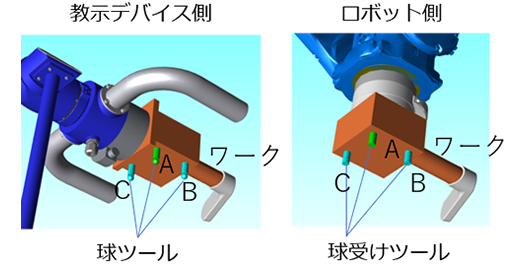
図6 キャリブレーションツールの取付け例
実演したデータを元に作成したプログラムをそのまま再生しても、配置の微小な位置誤差やロボットの力制御の応答遅れなどの要因により、操作者実演時とロボット再生時で力加減に微細な誤差が生じます。その場合に、繰返し学習制御では、図7のように作業1回ごとに力誤差を減少させるための修正量を位置指令に加算し、それを繰返し実行させることでロボットの力加減を実演時に近づけることが可能です。
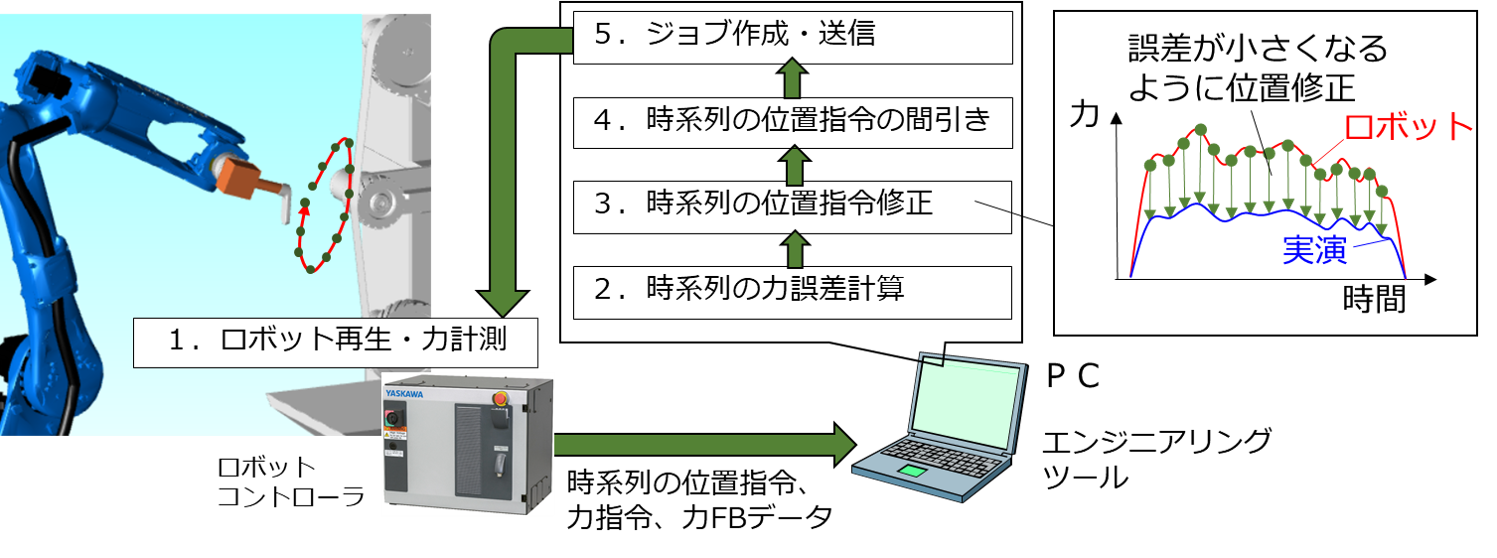
図7 繰返し学習制御
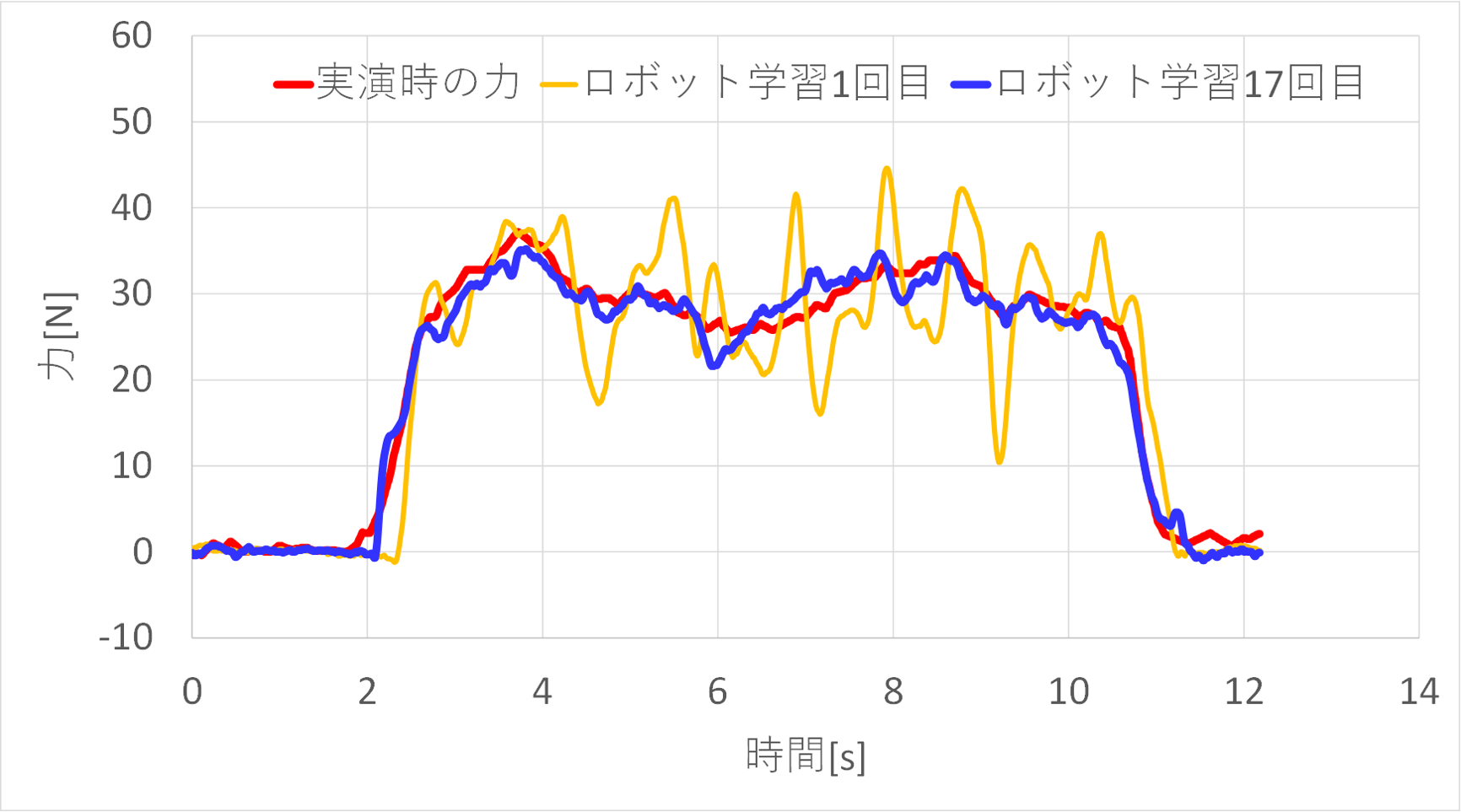
図8 力の繰返し学習例
操作者が学習の終了条件として力の許容誤差を指定し、学習実行すれば、ロボット自身が自動で作業を繰返し、図8のように力加減を調整してくれます。生産稼働時には、学習完了してできあがったプログラムを使用することで熟練技能者の研磨作業を忠実に再現できます。また、熟練技能者のスキルをデジタル化して残すことができ、技能の保存、伝承、標準化が可能です。
システムインテグレータ様やお客様にご使用いただき、いただいたフィードバックを機能に生かすことで、更なるロボット導入障壁の低減につながるように今後も改善に努めていきます。また、研磨作業以外への展開も検討しておりますので、ご要望ありましたらぜひお知らせください。
当社は引続き、生産現場における更なる生産性や競争力の向上に向けた、産業用ロボットの活用に取り組んでいきます。
![]()

Copyright © 2003‐2026 YASKAWA ELECTRIC CORPORATION.









