
 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト
i3-Mechatronics
(アイキューブメカトロニクス)
 サーボモータ
サーボモータ
- サーボモータとは
- カタログ・仕様 など
 インバータ
インバータ
- インバータとは
- カタログ・仕様 など
 産業用ロボット
産業用ロボット
- 産業用ロボットとは
- カタログ・仕様 など
















 財務・業績
財務・業績
ニュース・制作物
本社・施設見学
資材調達
ソリューションコンセプトサーボモータ
インバータ
産業用ロボット
財務・業績
| 技術分野 | ロボット技術 |
| 技術キーワード | 自動車,自動化,省エネ,高品質化,高効率化,コストダウン,生産性向上,ロボット |
2023年10月3日
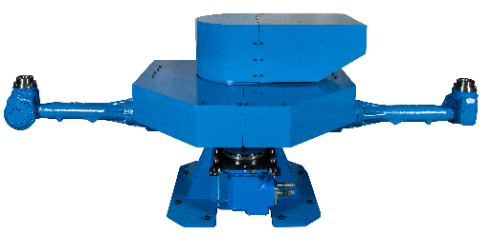
図1 MOTOFEEDER TILT
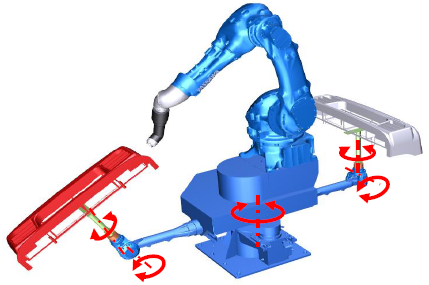
図2 塗装ロボットを搭載したMOTOFEEDER TILT
SDGs達成に向けて製造業においても省エネやカーボンニュートラルへの取組みが求められています。
自動車工場では、一般的に「塗装工程」が最もエネルギー消費が大きく、主な要因は塗装ブースの空調のエネルギー消費です。そのため、塗装ブースの縮小化、塗装時間の短縮化が求められています。中でも高い意匠性が要求される自動車バンパーなどの樹脂部品は大形かつ多面的な形状となり、このような部品の塗装はロボット単体だけでは難しく、人による追加塗装のために塗装ブースのエリア拡大が必要となったり、不良品の再塗装で、ブース稼働時間の長時間化となったりすることが、更なるエネルギー消費増大の要因となっています。
当社は1980年代から塗装ロボットの製造・販売を行っており、塗装工程の省エネルギー化実現のためにワーク搬送装置兼ポジショナ(製品名:MOTOFEEDER TILT、図1)を開発し2020年に市場投入しました。本製品は、図2に示すように塗装ロボットを搭載して使用し、塗装ロボットのコントローラで動作する旋回・傾動・回転軸でワークの搬出入と塗装時のワーク姿勢の制御を行います。図3に示すように、傾動・回転軸動作によりロボットが塗装しやすい姿勢にワークを位置決めすることで様々な効果をもたらし、塗装工程の省エネを実現するとともに、不良品の減少が期待できます。
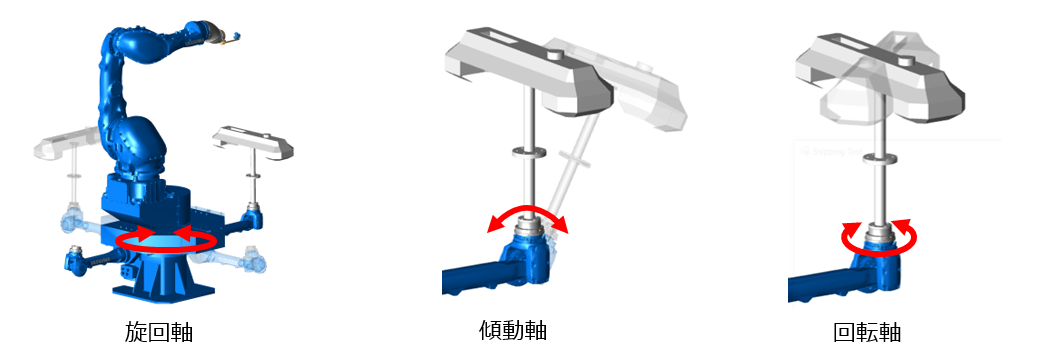
図3 MOTOFEEDER TILTの動作軸
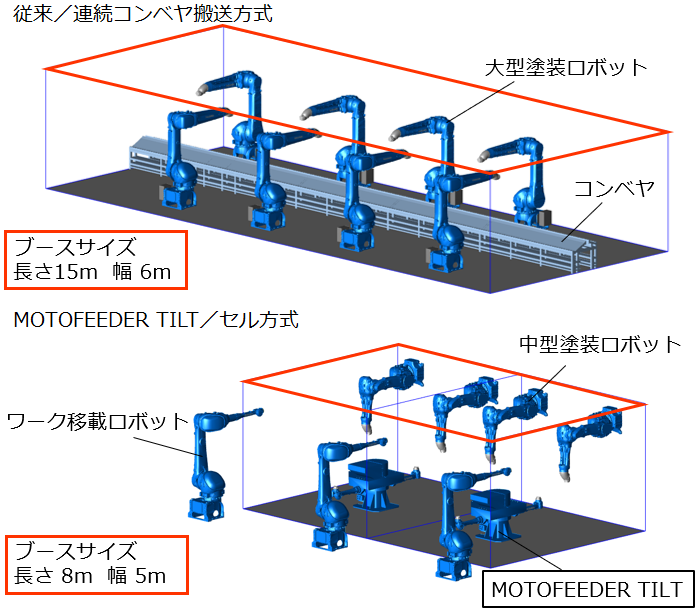
図4 従来方式とMOTOFEEDER TILTを
用いたセル方式の塗装ライン
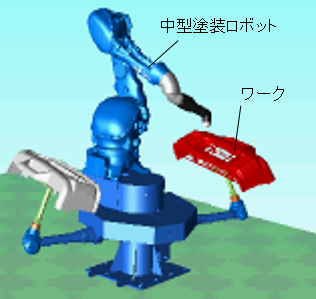
図5 傾動・回転軸を用いたワーク搬送
塗装ブースの縮小は、空調コストの削減に大きな効果が見込まれます。MOTOFEEDER TILTの塗装方式は、従来のコンベヤを用いた塗装方式と比べて、塗装ブース面積を縮小することができます。従来方式とMOTOFEEDER TILT方式の塗装ブースサイズを図4に示します。
従来の塗装工程は、ワークをコンベヤで運び、ロボットで塗装する連続コンベヤ搬送方式でした。この場合、ワークが固定されているので、全ての塗装面に到達できるよう複数の大型塗装ロボットで塗装が行われています。また、塗装中にワークが移動する距離を確保したり、隣り合うワークへの塗料付着を避けたりすることが必要なので、ブースエリアを大きくとらなくてはなりません。
MOTOFEEDER TILTによるセル生産の場合、塗装側には常にワークは1つとなり塗装していないワークへの塗料付着を気にする必要がないので、隣り合うロボットの間隔を狭くできます。 また、ワークの姿勢を傾動・回転軸で制御するので、従来と同じワークを中型塗装ロボットで塗装でき、ワーク入れ替え時は傾動軸を用いてワークを内側に傾斜させながら旋回させることで、ブースの大幅な縮小を実現します。
さらに図5に示すように、塗装ロボットを本体上部に搭載すれば、ロボット台数の減少により、更なるブースエリアの縮小を実現できます。
一例として2つの方式で同一ワークを同一条件(同一の速度、軌跡)で塗装を行い必要なブース面積を比較したものを図6に示します。MOTOFEEDER TILTを用いることで、空調エネルギーに直結するブース面積の縮小(約35%)が可能となります。
また、一定方向に塗布することになるので、塗料ミスト抑制効果によりダウンフロー風速を下げることができ、更なる空調コスト削減にもつながります。
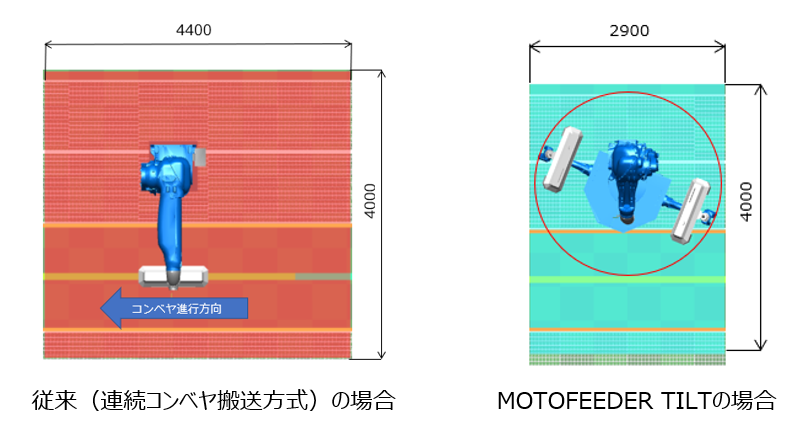
図6 一工程当たりのブース面積比較
従来の連続コンベヤ搬送方式ではワーク側の姿勢は固定のため、自動車バンパーやグリルなどの大形外装部品は全ての塗装面に到達できるよう複数の大型塗装ロボットで塗装が行われています。
図7にMOTOFEEDER TILTの上部に搭載したロボットによる塗装の様子を示します。MOTOFEEDER TILTでは、ワーク側の姿勢を当社独自のロボット制御技術により傾動方向・回転方向に制御する(特許取得済)ことができるので、長いリーチの大型塗装ロボットや複数台の塗装ロボットが必要なくなり、中小型塗装ロボット1台でも大形部品の塗装が可能となり、ロボットのサイズダウンや台数削減ができ、消費電力を削減できます。
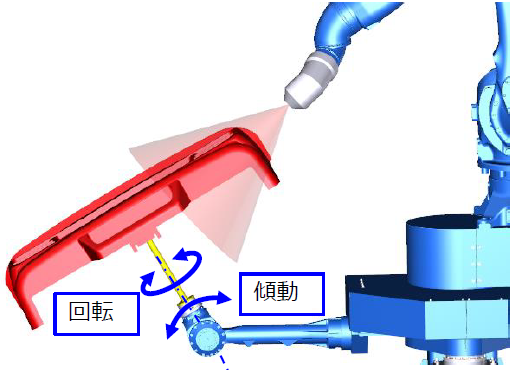
図7 MOTOFEEDER TILTの上部に搭載したロボットによる塗装
MOTOFEEDER TILTを用いた場合、傾動・回転軸によりワークの塗装面を常にロボット正面に配置できることで塗布方向が常に一定になり、下からの吹上げやロボット自身に向けての塗装がなくなります。これによりブース内に堆積した塗料が剥がれ落ちてワークに付着するといった不良品発生のリスクの低減や清掃作業時間の短縮につながり、生産準備にかかるブース稼働や人件費などコスト削減を実現できます。
塗装による汚れを削減する設置例を図8に示します。塗布方向が一定のため、常に排気ダクトの吸気口に向けて塗装を行うことができ、ロボット自身やブース内への塗料の付着を防ぎます。
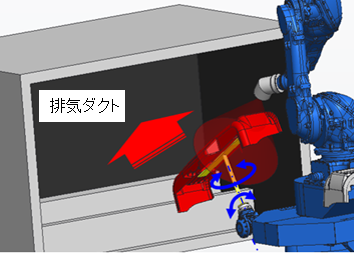
図8 塗装による汚れを削減する設置例
傾動軸、回転軸によってワークの姿勢を制御しながら塗装を行うことで、塗装ロボット単体では届きにくい部位にも塗装面に面直かつきめ細やかに塗布することができ、品質が向上します。従来のワークが固定された状態での塗装姿勢を図9に示します。ロボットアームの動作だけではワークに対して面直姿勢がとれないため、塗料の届きにくい部位には多量に吹き付けることで対応します。これに対して、図10で示すように、MOTOFEEDER TILTの回転・傾動軸を用いた塗装では、ワークに対して面直姿勢をとることで塗りムラ、塗料の過剰な堆積が減少し、補正塗装、再塗装作業の時間が減少します。これは人員、機器、エリア(特に空調)にかかるコストを削減できます。
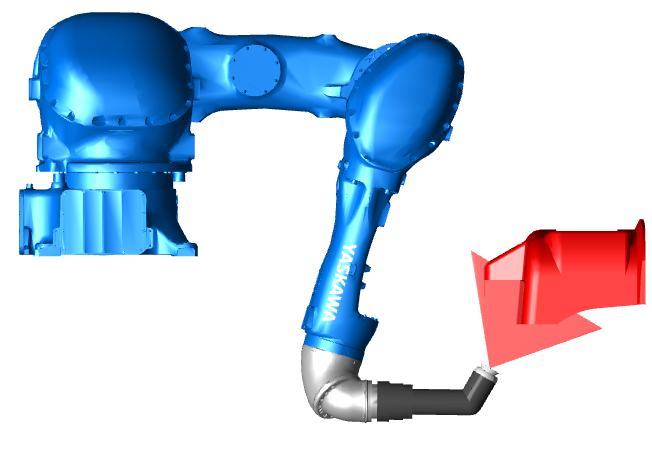
図9 ワークが固定された状態での塗装姿勢
(従来の連続コンベヤ搬送方式)
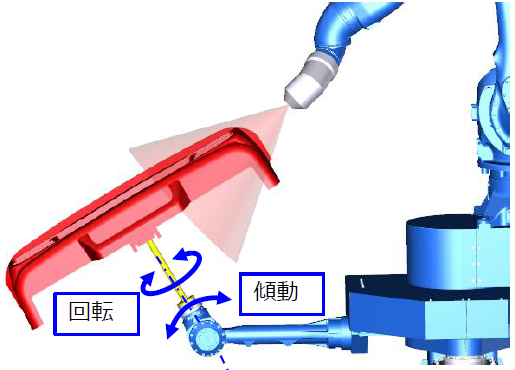
図10 回転・傾動軸を用いた塗装姿勢
(MOTOFEEDER TILTを用いた方式)
また、MOTOFEEDER TILTを用いた方式では、ロボットや各機器の設置誤差による塗装品質への影響を削減できます。従来の連続コンベヤ搬送方式とMOTOFEEDER TILTを用いた方式それぞれによる設置時のロボットとワークの位置関係を図11、図12に示します。従来方式ではロボットや各機器を個別にフロアに設置するため、設置誤差がロボットとワークの相対位置の誤差につながり、塗装の品質に影響します。MOTOFEEDER TILTを用いた方式ではMOTOFEEDER TILTにロボットとワークを搭載し、ロボットとワークの位置関係に精度をもたせているので、双方の位置関係は一定になります。このため、シミュレーションと実機の精度が確保され、動作の共有が可能となり、品質確認工数が削減できます。この効果によりMOTOFEEDER TILTは設置誤差を気にする必要がなくなるので、例えば、熟練した塗装技術者がいない海外拠点にも国内拠点で品質出しした動作データを共有することで現地の立上げ時間を短縮できます。
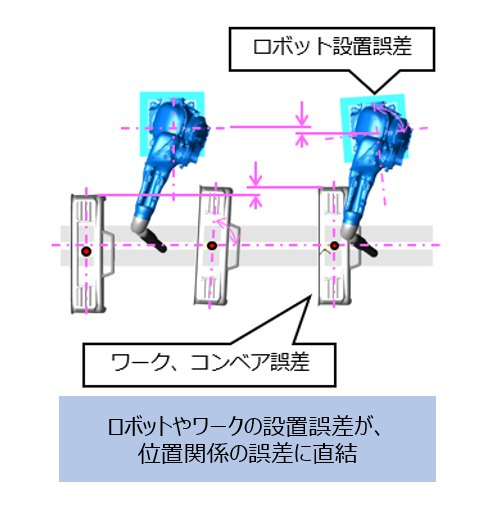
図11 従来の連続コンベヤ搬送方式での
ロボットとワークの位置関係
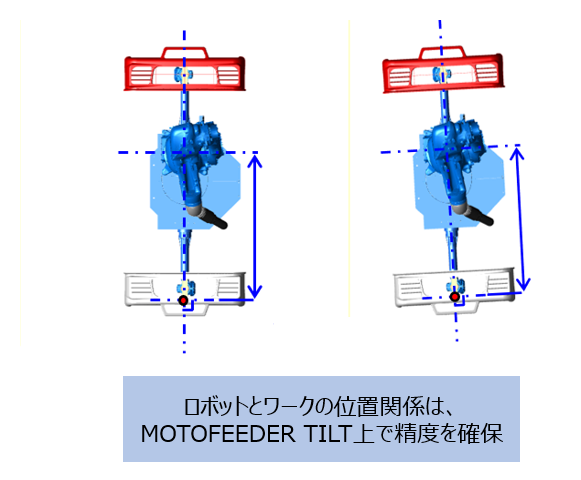
図12 MOTOFEEDER TILTを用いた方式での
ロボットとワークの位置関係
連続コンベヤ搬送方式の場合、ロボットが塗装可能な動作範囲にワークが入るまでの待ち時間やロボットの姿勢やワークとの干渉などで塗装できないことによる待ち時間が発生します。
MOTOFEEDER TILTの2本のアームを用いた塗装とワークの搬入出を図13に示します。MOTOFEEDER TILTの片側のアームに載せたワークを塗装中に、反対側のアームにワークの搬入出が可能であり、ワークを内側に傾動させて大回転を行うことでワークの脱落を防ぎながら旋回速度を上げることができるので、ワークが入るまでの待ち時間を短縮できます。ワーク姿勢を制御できるためワークとの干渉による待ち時間もなく塗装でき、これらの効果で生産時間を短縮できます。
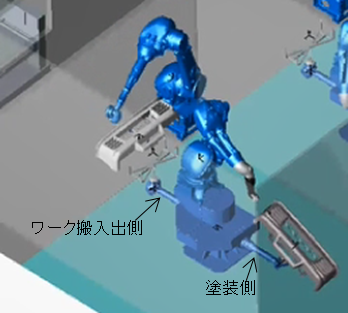
図13 2本のアームを用いた塗装とワーク搬入出
また、連続コンベヤ搬送方式の場合、コンベヤ生産の特性上、搬送されるワークの位置、搬送速度によっては干渉や特異点(ロボットが制御上動作姿勢がとれない姿勢)などの制限により、塗分けを必要とする場合がありますが、MOTOFEEDER TILTを用いた方式ではそのような制限はないため、塗分け不要な1パスによる塗装ができ、塗りムラのない均一な膜厚を実現できます。
コンベヤ生産で塗分けを必要とする例を図14に示します。ワークが固定された状態ではワークの面と面の間にロボット動作姿勢の特異点が生じるため、面ごと(青い矢印と赤い矢印)に塗り分ける必要があります。MOTOFEEDER TILTを用いた1パス塗装の例を図15に示します。MOTOFEEDER TILTでワークの姿勢を変えるためロボット動作姿勢の制限はなくなり、複数の面を連続動作で塗装することが可能となります。
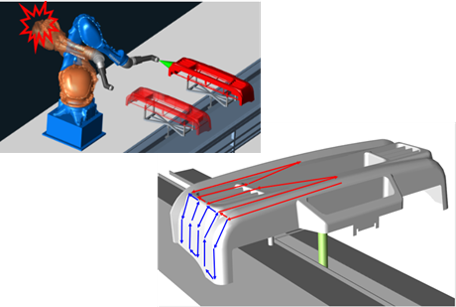
図14 コンベヤ生産で塗分けを必要とする例
(従来の連続コンベヤ搬送方式)
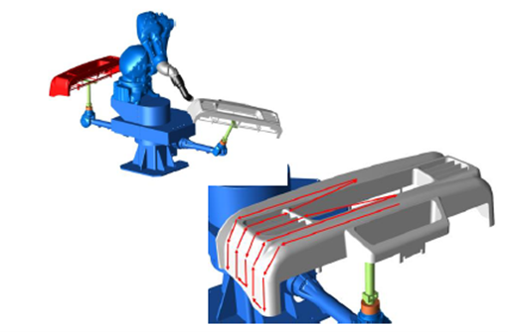
図15 塗分け不要な1パス塗装
(MOTOFEEDER TILTを用いた方式)
従来の連続コンベヤ搬送を用いた生産システムと今回提案するMOTOFEEDER TILTを用いた生産システムを自動車樹脂部品へ採用したレイアウト例(中塗り、上塗り1、上塗り2、クリアの4工程)を図16、図17に示します。また、それぞれのシステムにおけるエネルギー使用量を試算した結果を表1に示します。
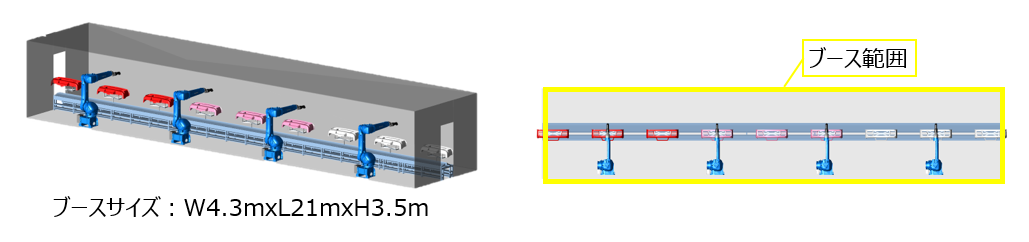
図16 連続コンベヤ搬送を用いた生産システム(従来)
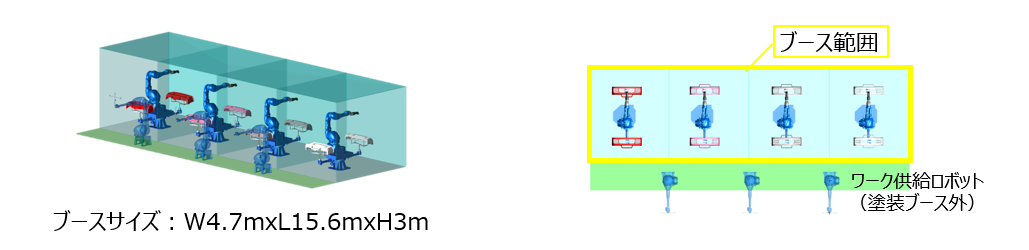
図17 MOTOFEEDER TILTを用いた生産システム
表1 従来システムと提案システムとの比較
| 項目 | 従来システム | 提案システム | 従来との比較 | |
|---|---|---|---|---|
| 100個生産時間 | 8350s | 6120s | 26%短縮 | |
| (色替えは10個ごとに1回) | ||||
| 1個生産時間(色替えあり) | 83.5s | 72.0s | 13.5s短縮 | |
| (塗装+搬送+色替え) | ||||
| 1個生産時間(色替えなし) | 83.5s | 60.0s | 23.5s短縮 | |
| (塗装+搬送) | ||||
| ワーク搬入出時間 | 15.0s | 3.5s | 11.5s短縮 | |
| ブース面積 | 90.3m2 | 73.3m2 | 18.8%削減 | |
| ブース風速 | 0.6m/s | 0.45m/s | 25%削減 | |
| ブース内給気風量 | 3251m3/min | 1980m3/min | 39%削減 | |
| 100個生産時の消費電力量 | 1108kWh | 522kWh | 52%削減 | |
生産方式の変更による「ブースの縮小」と「生産時間の短縮」、「空調の風速緩和」によりブース内への給気風量を減少できます。この効果により消費電力量は従来システムの1108kWhに対し、本システムでは522kWhとすることができ、従来比52%削減という大幅なエネルギー削減効果があります。
実際には本試算に加えてブース縮小によるイニシャルコストの低減や、セル塗装によって最適軌跡が使用できることによる生産および生産準備時間の短縮、変種変量生産では連続コンベヤと異なり生産に必要のないブースの稼働を止めることによる消費電力の削減などトータルコストとしては更なる削減を見込めます。
本製品を用いることで塗着効率の向上が可能です。全幅1800mm以上ある自動車用樹脂バンパーをMOTOFEEDER TILTのワーク搭載位置に取り付け、当社中型塗装ロボット(MPX2600)で塗装している画像を図18、図19に示します(ワーク部は画像処理を施しています)。前記のようにバンパーのような大形かつ多面的な形状をもつ部品もワーク姿勢を制御しながら塗装できるため、常に塗布面に面直かつ重力方向に塗装でき、通常30~40%の塗着効率であるエアスプレーを用いて60%を越える塗着効率を実現できました。塗着効率の向上は近年価格高騰している塗料消費の抑制を実現し、未塗着の塗料回収といったメンテナンス頻度にも影響を与えるため、コスト削減、省エネルギー化に貢献します。

図18 実施例:自動車用バンパー(前面部)の塗装
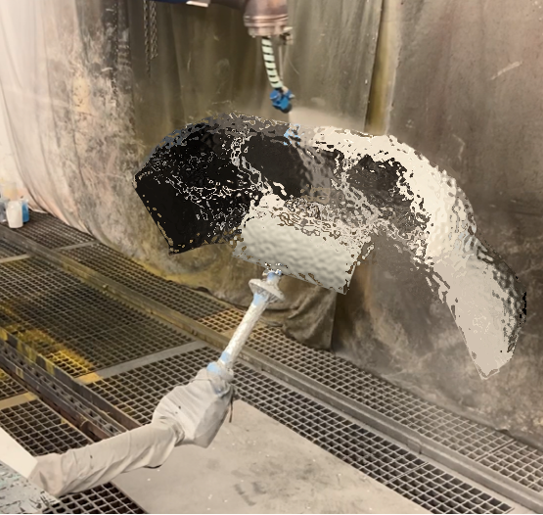
図19 実施例:自動車用バンパー(側面部)の塗装
MOTOFEEDER TILTは、塗装ブースの縮小化、塗装時間削減を実現し、生産時の消費電力削減に大きく貢献できます。このことが評価され、「令和4年度 第42回優秀省エネ脱炭素機器・システム表彰」にて「日本機械工業連合会会長賞」を受賞しています。今後も社会全体が目標としているカーボンニュートラル実現に向けて、省エネルギー化を実現するものづくりを続けていきます。今後も安川電機が生み出す製品にご注目ください。
![]()

Copyright © 2003‐2026 YASKAWA ELECTRIC CORPORATION.









