Global
Global




































可変速運転の主役 周波数
インバータはどのようにしてモータの速度を変えるのでしょうか。
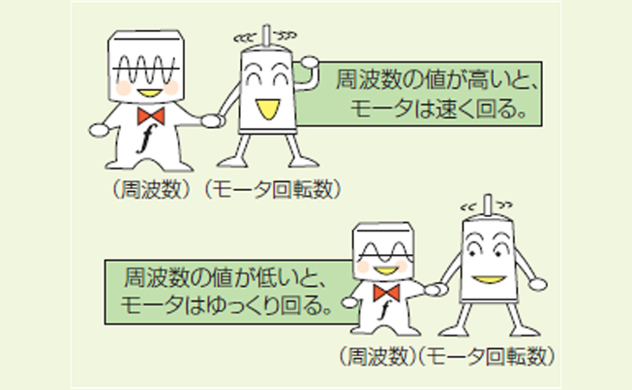
モータの速度、つまり回転数を変えるには、モータに与える周波数f(Hz)を変化させます。周波数の値が高ければモータは早く回り、周波数の値が低ければモータはゆっくり回ります。
インバータは周波数を変えることで可変速運転を可能にします。
ところで、定格の商用電源から広範囲の周波数を作り出すのに、インバータは何をしたのでしょうか?
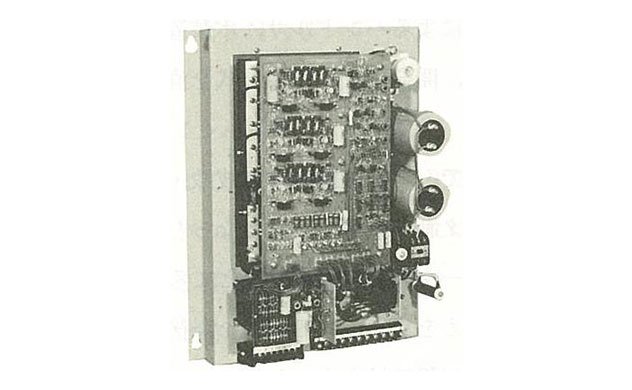
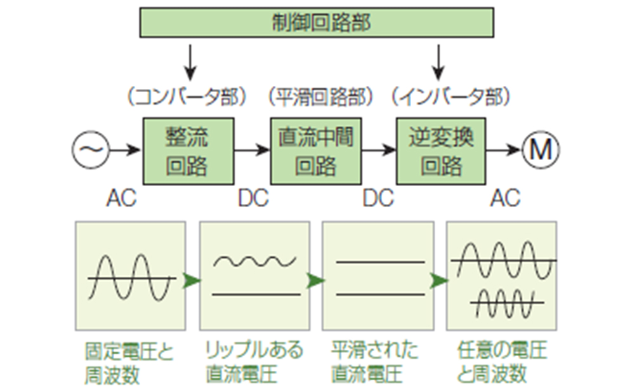
インバータの電力変換回路は、整流回路、中間回路、逆変換回路から構成されています。インバータは、交流電圧を整流回路で直流電圧に変換し、その直流電圧を直流中間回路で平滑にします。そして、その平滑された直流電圧を逆変換回路で任意の交流電圧・周波数に変換しモータに印加します。このような電力変換は、半導体素子であるパワートランジスタの高速スイッチングによって実現されます。スイッチング制御の違いにより出力された周波数が異なります。
電力変換方式PAM方式とPWM方式
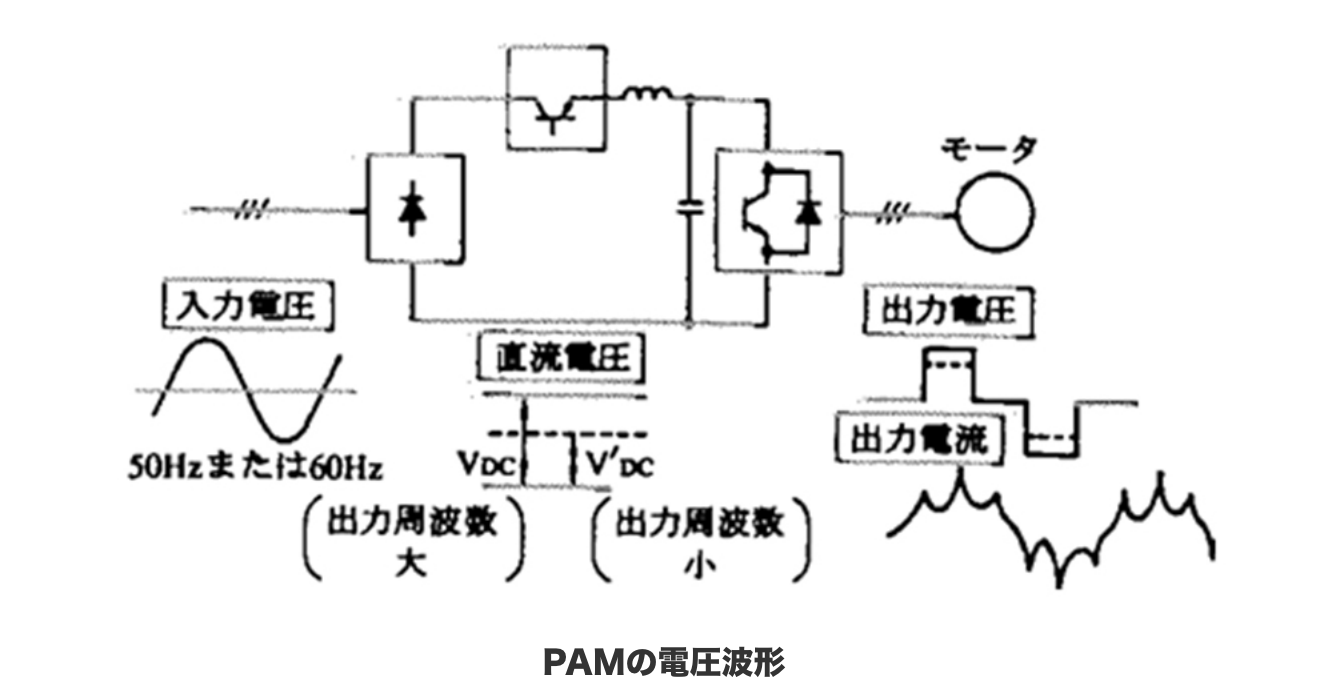
インバータの電力変換方式にはPAM(pulse amplitude modulation:パルス振幅変調)方式とPWM(pulse width modulation:パルス幅変調)方式が多く適用されています。
PAMは周波数の高さ を変える制御です。比較的に低いスイッチング周波数により変換可能で、エアコンなど家庭用製品に広く使われています。
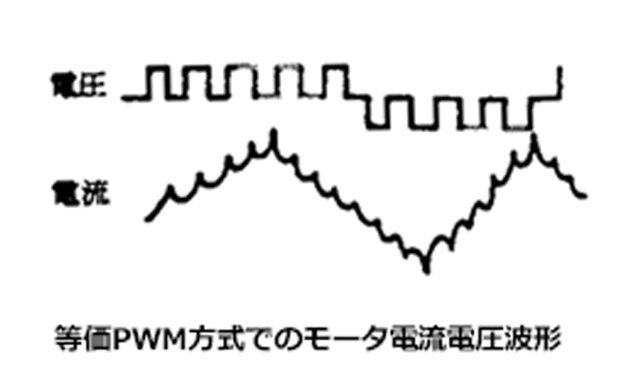
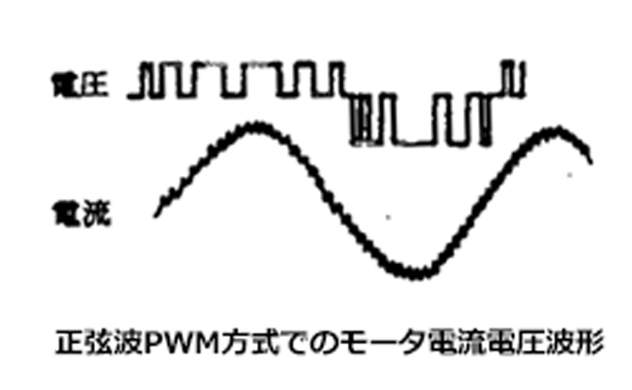
一方、PWMは周波数の幅を変える制御です。
所定のスイッチングパターン(指令された周波数と電圧)により瞬時にON/OFFし三相交流に変換できるので、広範囲な可変速ドライブを必要とする産業分野で普及しています。
インバータ制御方式 V/f制御とベクトル制御
機械には様々な種類があり、色々な動きがあります。インバータから出力された周波数を、どのように制御してそれぞれの機械に合ったモータ回転を行うのでしょうか?
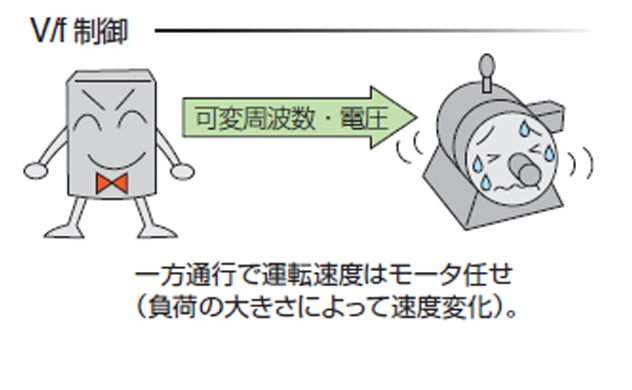
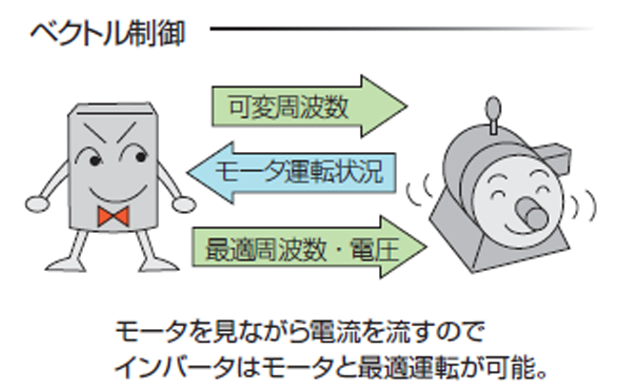
汎用インバータの標準制御方式にはV/f制御とベクトル制御があります。V/f制御は、インバータから出力された電圧(V)と周波数(f)の比を一定にした制御方法です。例えば、電源電圧200V級のインバータの場合、60Hzでは200V、30Hzでは100Vを出力します。V/f パターンで決まっている周波数と電圧をそのまま出力できるので、1台のインバータで同時に複数台のモータを回すことができます。一方、ベクトル制御は、モータに流れる電流のうち、トルクになる電流(トルク分電流)と回転子に磁界を発生させるための電流(励磁電流)とを分けて考え、モータ電流の方向をベクトル演算し制御する方法です。モータの特性に見合った電流を流せるので、誤差の少ない精度の良い運転を行うことが可能です。
誘導モータの回転には、「すべり」が必要
では、V/f 制御とベクトル制御を、どのように使い分けるのでしょうか?インバータ制御の特徴を話す前に、まずモータの「すべり」について簡単に説明しましょう。誘導モータの回転には、「すべり(slip)」というものが必要です。「すべり」とは固定子の回転周波数に対する回転子の回転周波数の遅れです。誘導モータの回転速度は、固定子と回転子の間に発生する電磁力を利用しているため、この「すべり」がないとトルクを発生することはできません。モータ負荷が大きいほど「すべり」が大きくなり、回転速度の遅れも大きくなります。
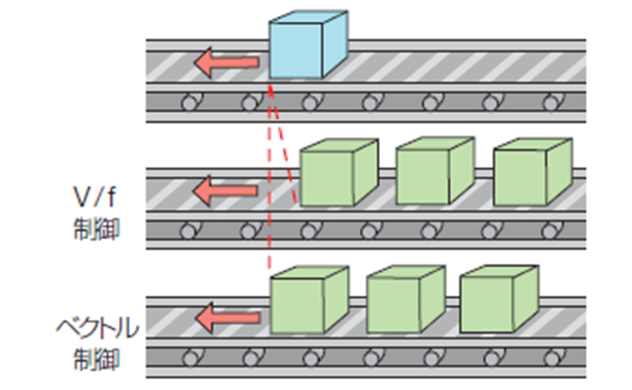
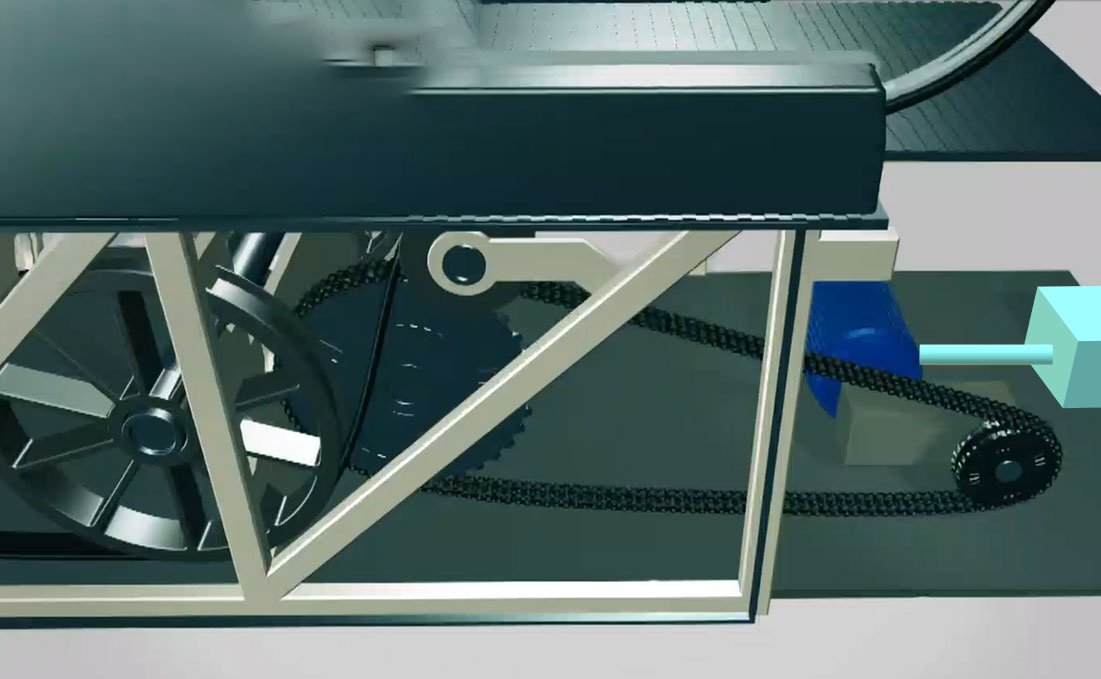
ベクトル制御では、その「すべり」分をリアルタイムに計算し上乗せしてモータに印加するため、モータの回転数は負荷の大きさによって変化せずに一定速度制御が実現できます。下図のコンベヤを例にすると、V/f制御では荷物が載っている場合と、そうでない場合でコンベヤ速度に変化が生じます。ベクトル制御では、荷物の重さに関わらず一定した速度制御が可能です。
制御性能から見たそれぞれの特徴と用途
インバータの制御性能は、低速トルク、速度制御範囲、速度制御精度といった指標から判断することができます。低速運転を行う場合、負荷が大きくなってくると、「すべり」も大きくなりモータ回転数が低下します。V/f制御では場合によって、モータは停止してしまいます。ベクトル制御では、大きなトルクが出せるので、低速でも停止せずに運転可能です。速度制御範囲と速度制御精度においては、V/f制御と比較してベクトル制御は、モータ電流のベクトル演算によってモータの特性を最大限に引き出せるので、制御範囲が広く、誤差の少ない可変速運転を実現することができます。ただし、それぞれのモータ特性に合わせる必要があるため、モータパラメータ設定が必要です。また、同時に複数のモータを回すことはできません。