
 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト
i3-Mechatronics
(アイキューブメカトロニクス)
 サーボモータ
サーボモータ
- サーボモータとは
- カタログ・仕様 など
 インバータ
インバータ
- インバータとは
- カタログ・仕様 など
 産業用ロボット
産業用ロボット
- 産業用ロボットとは
- カタログ・仕様 など
















 財務・業績
財務・業績
ニュース・制作物
本社・施設見学
資材調達
ソリューションコンセプトサーボモータ
インバータ
産業用ロボット
財務・業績
| キーワード | 半導体, 高性能・高精度, 品質向上, サーボ, モータ |
| 関連製品 | Σ-XシリーズFT71仕様, リニアモータ, 磁気浮上6自由度アクチュエータ |
2026年5月28日
生成AI向けなどの超高性能半導体の生産では、チップレットや3D実装といった先端パッケージング技術が不可欠です。この生産に欠かせない装置の一つとして、「ハイブリッドボンダ」が普及し始めています。Waferにカット済みのDieを積層する手法(Die to Wafer)や、WaferとWaferを重ね合わせる手法(Wafer to Wafer)(図1)により、半導体部品の飛躍的な高性能化を実現しています。一方で、接続ピッチの狭小化に伴い、製造装置であるハイブリッドボンダを駆動するサーボドライブには、数nm(1mmの100万分の1)レベルの停止安定性と精度が求められます。
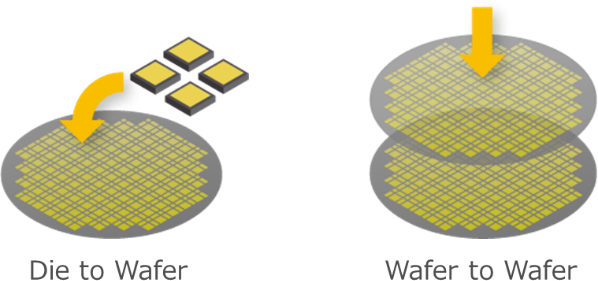
図1 Die to Wafer / Wafer to Waferイメージ
このような要求性能の変遷に対し、当社では3D実装の核となるDie to WaferおよびWafer to Waferの両方式に向けたソリューション開発を推進しています。当社は、モータおよびセンサー(エンコーダ)の制御技術を更に進化させることで、ハイブリッドボンダをはじめとする最先端装置に不可欠な『高い実装精度』と『生産性の向上』の両立を支援します。
本レポートでは、IIFES 2025で展示したデモ機を例に、実装精度と生産性を高いレベルで両立する当社のソリューションを解説します。その中核をなすのが、Waferの立体的な姿勢制御を担う『6自由度アクチュエータ』と、ボンディングヘッドを高精度に制御するサーボパック『Σ-Xシリーズ』の用途最適形です。本デモ機では、最新の『Σ-XシリーズFT71仕様』を採用しています。このFT71仕様は、nm単位の極微細な位置決めを可能にする高精度制御に加え、ガントリ機構の高度な同期制御機能も内蔵しています。最新コンポーネントの組み合わせによって、次世代半導体製造に不可欠である『超高精度な位置決め』をいかに実現しているか、その詳細を解説します。
近年、半導体製造装置においては、半導体の多層化や3D実装の進展に伴い、nm単位での高精度な制御技術が不可欠となっています。特に、端子同士を直接つなぐことで高密度化を図るハイブリッドボンディングにおいては、接続の間隔が極めて狭くなるため、装置への要求はますます厳しいものとなっています。
そのため、最先端装置の駆動を担う電機品には、以下のとおり、これまでの常識を覆す極めて高い位置決め精度と停止安定性が求められています。
各コンポーネントにおける性能を極限まで高め、積み上げることで、最終的な装置全体の実装精度を担保する必要があります。
前述の課題に対し、「半導体ソリューションデモ機」(図2)における適用技術を紹介します。
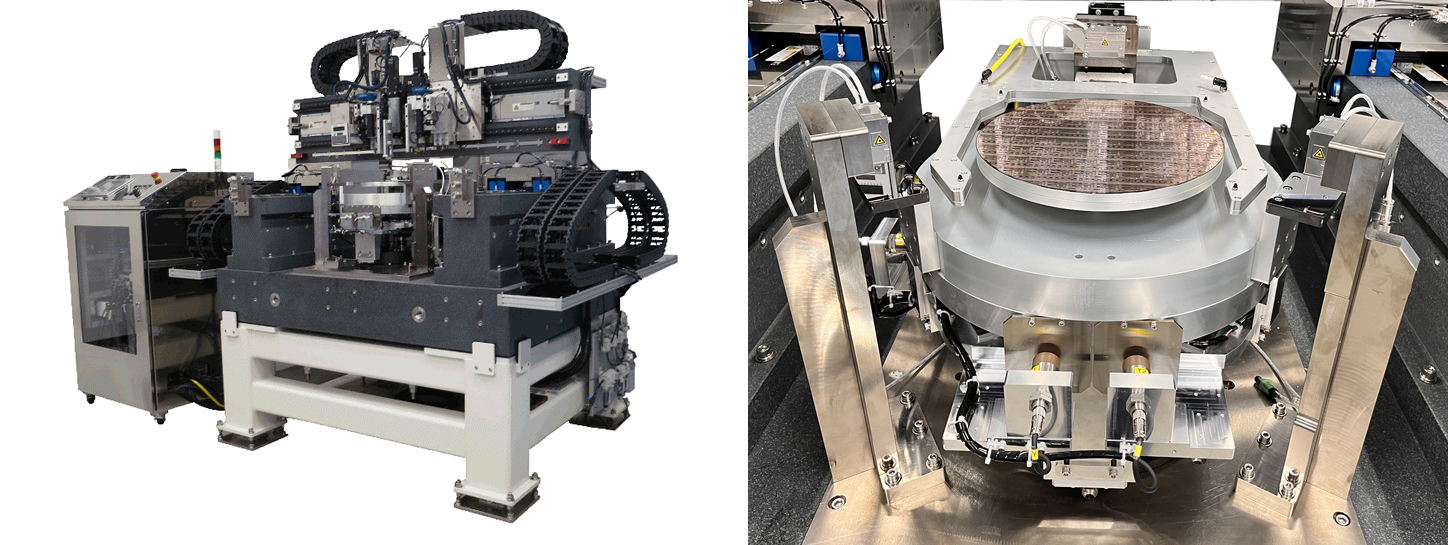
図2 半導体ソリューションデモ機 / 6自由度アクチュエータ 外観
ガントリ機構を駆動するリニアモータの制御においてnmオーダの精度を求めると、これまで無視できていたモータの停止状態での微小な振動、部材の剛性不足や慣性によるわずかなピッチング(前後方向の傾き)やヨーイング(左右方向の振れ)、構造のねじれ等が顕在化します。さらに、モータの駆動に伴う発熱がもたらす構造材の微細な熱膨張も加わり、従来とは次元の異なる難易度の高い課題となります。
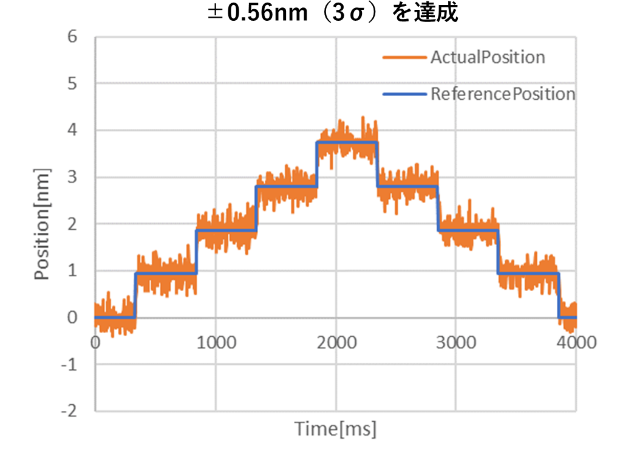
図3 停止安定性±0.56nm 達成データ
(実測波形グラフ)
このような課題に対し、「Σ-Xシリーズ」サーボパックの制御を最適化し、電流検出分解能の向上と各制御ループの最適化を行いました。これにより、24pm/パルス(pmはmmの10億分の1)という高分解能スケールからのフィードバック情報に対して電流を的確に制御できるようになり、通常はリニア式のアンプが必要とされる領域においても、汎用的なPWM式のサーボパックにて同等レベルの停止安定性を実現しました。
さらに、磁気吸引力を抑制する新構造のコア付きリニアモータによるピッチング低減、および液冷方式による熱変形抑制により、安定した駆動基盤を構築しました。
これらの技術を組み合わせることで、社内評価において停止安定性±0.56nm(3σ)(図3)を達成しました。これにより、ハイブリッドボンダにおける実装精度の確保と、タクトタイム短縮による生産性の向上を両立します。
また、ガントリ機構の制御には、「Σ-Xシリーズ FT71仕様」が持つガントリ駆動に最適な各種機能を適用しました。特長的な機能である「モード分離制御」は、機構の動作を推進成分と回転成分に分離し、各成分に対する独立したゲイン調整を可能にするとともに、1軸分の指令のみで2軸の同期指令を生成することで、従来不可欠であった厳密な同期制御や厳密なパラメータ調整を不要としました。加えて、高精度制御を支える「位置補正テーブル機能」や「軸間位置偏差過大検出機能」、アラーム発生時の「協調停止機能」を備えており、ガントリ機構の安定動作に寄与します。
ハイブリッドボンディングにおいては、平面的な位置決めに留まらず、Waferの微細な誤差や傾きに対する補正など、3次元空間での高度な姿勢制御技術が求められています。
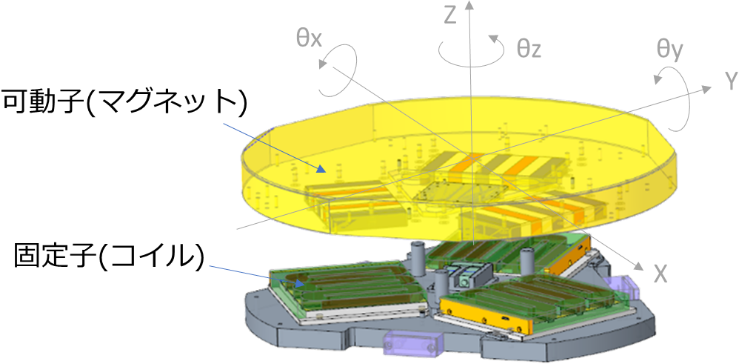
図4 6自由度アクチュエータによる
Wafer姿勢制御の様子
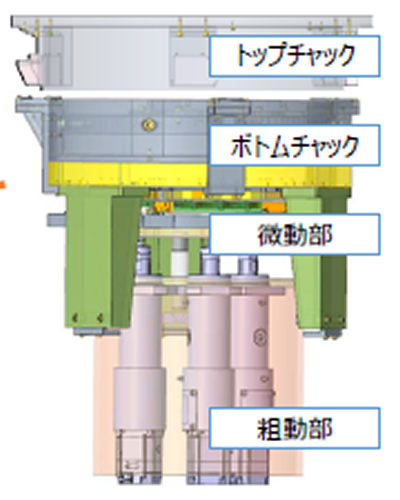
図5 6自由度アクチュエータ 構造図
(可動子・固定子の配置図)
本デモ機においては、Waferの姿勢制御に磁気浮上技術を活用した「6自由度アクチュエータ」(図4、図5)を採用しています。このアクチュエータは、マグネットとコイルを最適配置した独自の構成により、1つのユニットで「水平方向」と「垂直方向」の独立した推力を発生させることができます。この2方向の推力を持つユニットを120度間隔で3対配置し、6つのセンサー情報を元に図4に示すX,Y,Z,θx,θy,θzの6軸に対して各ユニットのコイルに適切な電流を流し、推力を制御することによって6自由度動作を実現しました。従来のヘキサポッド機構(パラレルリンク型6自由度機構)では機械的接触に起因する摩擦やバックラッシュの影響を受けるのに対し、機械的摺動部を持たない磁気浮上方式は、わずかな摩耗粉も許されないクリーンな環境に適しています。これまで当社が培ってきたモーションコントロール技術を本アクチュエータに集約することで、XY方向±5nm、Z方向±10nmという精度で立体的なアライメント補正が可能となり、チップレットや3D実装といった先端パッケージング技術に求められる高度な要求に応える技術を確立しました。
昨今ではAIやDXなどデータ活用によるモノづくりが盛況であり、当社においても「i3-Mechatronics」のソリューションコンセプトを掲げていますが、装置を深掘りしていくと最終的にはモータとセンサーの性能に行き着きます。モータの高精度制御は当社が古くから培ってきた技術であり、そこを改めて一から見直したことで、従来の枠を超える精度の達成に至った意義は大きいと考えています。
今後の課題として、最終的にお客さまが必要とする「実装精度」を満足するため、Waferの姿勢とボンディングヘッドの先端を超高精度に制御する必要があり、複数軸の同期制御と複数の外部センサーを活用したアプリケーションが必須となります。当社は、お客さまに容易に装置精度を向上いただけるソリューションの実現に向けて、事業部と技術開発本部で密に連携し技術開発を進めてまいります。
![]()

Copyright © 2003‐2026 YASKAWA ELECTRIC CORPORATION.









