
 Global
Global

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト
i3-Mechatronics
(アイキューブメカトロニクス)
 サーボモータ
サーボモータ
- サーボモータとは
- カタログ・仕様 など
 インバータ
インバータ
- インバータとは
- カタログ・仕様 など
 産業用ロボット
産業用ロボット
- 産業用ロボットとは
- カタログ・仕様 など
















 財務・業績
財務・業績
ニュース・制作物
本社・施設見学
資材調達
ソリューションコンセプトサーボモータ
インバータ
産業用ロボット
財務・業績
技術2007年11月28日
株式会社安川電機(取締役社長 利島 康司)は、これまで開発を進めてきた次世代ロボットSmartPalに、さらに機能を向上させたサービスロボット(非製造業用業務支援ロボット)「SmartPalⅤ(スマートパル ファイブ)」を開発しました。
近年、少子高齢化による深刻な人手不足が懸念される一方、「快適」「便利」「安全」といった生活の質的向上が求められています。当社は、非製造業分野に向けたサービスロボットの開発を進め、サービスロボットによる業務負荷、業務コストの低減を通して、生活の質的向上に寄与したいと考えております。
このような観点から、当社では従来よりサービス用途を想定した次世代ロボットSmartPalを開発し、機能向上を進めてまいりました。このたび、機能向上とともに、腰部ユニットの追加により作業可能範囲を拡大させたサービスロボット(非製造業用業務支援ロボット)「SmartPalⅤ(スマートパル ファイブ)」を開発しました。
「SmartPalⅤ外観」

SmartPalⅤは、これまでのSmartPalに比べ以下の点を改善しています。
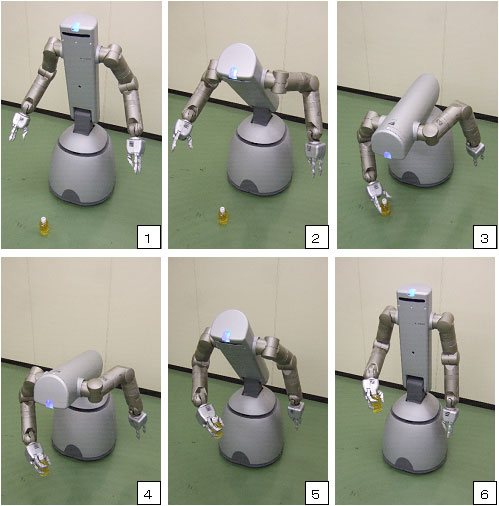
・ 腰部ユニットの追加
SmartPalは、腕部や手部、移動部などの機能単位でユニット化され、容易に追加・変更が可能な構成になっています。これは、用途に適したユニットを組み合わせることで、非製造業分野の多様なニーズに柔軟に対応できるようにするためです。SmartPalⅤでは、これに新たに腰の屈曲動作を可能にする腰部ユニットを追加しました。これにより、床に置かれた物を取ることができるなど、可能な作業範囲が大幅に拡大されました。
・ 体型のスリム化
人間と共存するサービスロボットは、周囲に威圧感を与えないスリムな体型であることが必要です。SmartPalⅤでは、内蔵するアクチュエータやサーボドライバのさらなる小形化により、体型のスリム化を図りました。特に胴体は従来のSmartPalに比べ体積比1/2となっています。
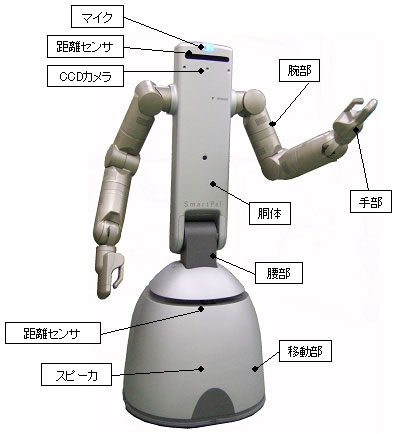
(1) 腕部
物をつかんだり運んだりするための2本の腕です。一般の産業用ロボットよりも1つ多い7つの関節により、人の腕と同様の自由な動きを実現しています。
(2) 手部
腕部の先端に装着され、物を直接つかむ手です。1関節のグリッパ、または3指9関節の多指ハンドのいずれかが装着可能です。
(3) 移動部
建物内を自由に移動できる車輪機構です。3軸の車輪によって、前後・旋回だけでなく横や斜めなど全方向に自由に移動できます。
(4) 腰部
今回新たに追加された,腰部の屈曲動作を可能にする関節機構です。2つの関節により腰部を屈曲させることにより、床に置かれた物を取ることができるなど、作業範囲が大幅に拡大されました。
(5) コミュニケーション機能
人と簡単に情報交換するための機能です。マイク入力による音声認識と、スピーカ出力による音声合成により簡単な会話が可能です。
(6) 環境認識機能
まわりの状況や物を認識するための機能です。胴体に搭載されたCCDカメラの画像を予め教えられた画像と照合することにより、つかもうとしている物がどこにあるかを検出できます。
また、距離センサによって周囲の物体との位置関係を認識することができます。
(7) 通信機能
遠方にいる他のロボットや、エレベータ等の周辺装置と情報交換するための機能です。無線通信ネットワークを用いることで、2台以上のSmartPalが協調して動作することもできます
「SmartPalⅤ各部説明」
「床に置かれた物を取る動作例」
|
4.SmartPalⅤの主な仕様 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
| *1 多指ハンドユニット装着時には全37自由度(手9×2) *2 通常作業領域(本体前方)での可搬重量 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
・ 商業施設や空港等での案内
・ オフィス内サービス業務(荷物搬送や巡回警備)
・ 介護支援(物品の手渡しなど) などの業務支援用途
今後はSmartPalの機能向上をさらに進めるとともに、開発したユニットを組み合わせて案内・搬送等の用途に向けた新たなサービスロボットを開発していきたいと考えております。
その一例として、液晶プロジェクタを搭載して移動しながらのプレゼンテーションが可能な案内ロボット「SmartGuide(スマートガイド)」もあわせて開発しております。本ロボットは、SmartPalⅤの移動部ユニットと腰部ユニットを応用展開したものです。
「SmartGuide」の外観と仕様 (ご参考)

|
項目 |
仕様 |
|
全高 |
836mm |
|
全幅 |
555mm |
|
全長(奥行) |
613mm |
|
重量 |
90kg |
|
自由度(軸数) |
全5自由度(腰2,移動3) |
|
腰(首)曲げ角度 |
パン:-135~+135°,チルト:-65~+15° |
|
移動速度 |
最大 3.6km/h |
|
センサ |
距離センサ×2,接触センサ×4 |
|
コミュニケーション機能 |
音声合成,液晶プロジェクタ |
|
通信機能 |
無線LAN(IEEE802.11g) |
|
稼動時間 |
連続4時間 |
お知らせ: 「SmartPalⅤ」および「SmartGuide」は、2007年11月28日から12月1日まで東京ビッグサイトで開催される「2007国際ロボット展」の安川電機ブースにて展示・実演を行う予定です。
SmartPalは、株式会社安川電機の登録商標です。
[お問い合わせ先]
株式会社 安川電機
技術開発本部
ニューメカトロニクス事業化推進室
次世代ロボットチームリーダ
松熊研司
Tel.093-571-6112
Fax.093-571-6044
E-mail:kaikenrq@yaskawa.co.jp
![]()

Copyright © 2003‐2026 YASKAWA ELECTRIC CORPORATION.









