
 Global
Global



























CASE
ユースケース

 ニュース・制作物
ニュース・制作物
 本社・施設見学
本社・施設見学
 資材調達
資材調達
 ソリューションコンセプト
ソリューションコンセプト サーボモータ
サーボモータ
 インバータ
インバータ
 産業用ロボット
産業用ロボット
 財務・業績
財務・業績
最近、「フィジカルAI」や「AIロボティクス」、「ヒューマノイドロボット」という言葉をニュースやSNSで見かけることが増えてきました。産業用ロボットは、人が教えた通り、正確に繰り返し動作することを得意としています。それに加えて、安川電機は、AIによって「状況を理解し、自ら判断して動く」産業用ロボットを実現しました。これが、AIロボット「MOTOMAN NEXT」です。
まだまだ人にしかできない
作業がたくさんあるから
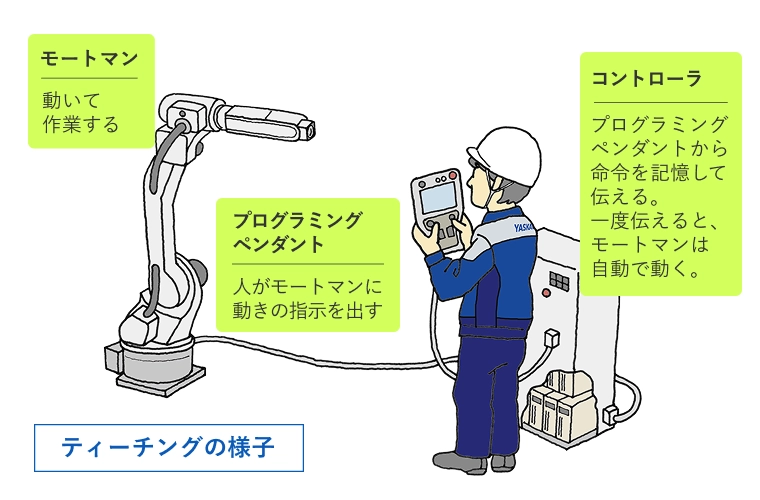
産業用ロボットは、自動車工場をはじめとする製造現場において「同じ動きを、正確に、速く、何度も繰り返す」作業(例えば、自動車の溶接や塗装など)を中心に拡大していきました。
これは「ティーチングプレイバック方式」と呼ばれ、人があらかじめ教えた動作をそのまま再現する仕組みです。その後、家電製品や電子部品の組み立て、物流倉庫での仕分けなど、活躍の場はますます広がっています。
一方で、ロボットがまだ十分に活躍できていない作業も多く残されています。その代表が、「あいまいな判断」が求められる作業です。




たとえば、
こうした作業では、これまで人の目や感覚に頼らざるを得ず自動化が進んでいませんでした。
お惣菜を盛り付ける、ケーブルを配線する、いちごをきれいにパック詰めするなど、私たちの生活を支える多くの場面では、今も人手による作業が中心となっています。
これを解決するのがAI ロボット「MOTOMAN NEXT」です。
人のように自分で判断して
動くことができる
AI ロボット「MOTOMAN NEXT」は、カメラなどのセンサーから得た情報をもとに自ら状態を認識し、「今どんな状態か」「次に何をすべきか」を判断することで、動作を計画・実行することができます。
これにより、扱うモノの位置や形が毎回異なる作業を自動化することができるようになります。これがロボットの「自律性」です。
この「自分で認識・判断する力」を支えているのが AI(Artificial Intelligence:人工知能)です。
ロボット自ら
「今どんな状態か」「次に何をすべきか」
を判断し、動作を計画
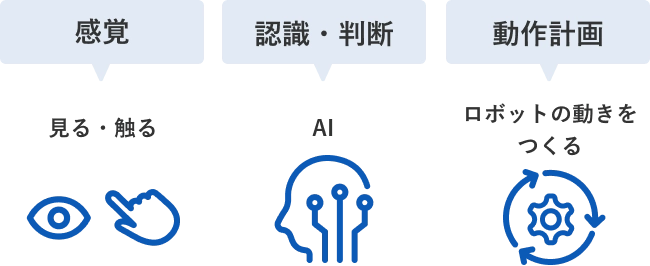
計画した動作を正確に再現
AI による物体認識や状況判断する能力をロボットに加えることで、たとえば次のようなことができます。
CASE
1
形や大きさが一つひとつ異なるいちごを見分け、きれいな形のものだけを選んでパック詰めする
CASE
2
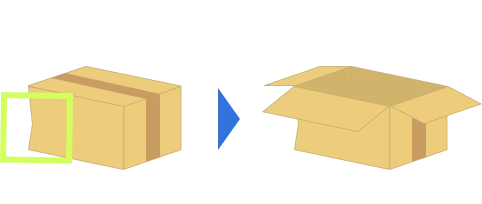
輸送などで変形してしまったダンボールの形状を認識し、状態に応じて適切に開封する
CASE
3
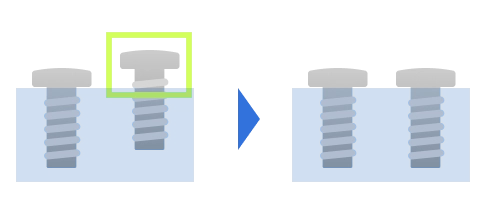
ねじの締まり具合を認識して作業の成功・失敗を判断し、失敗していた場合はやり直す
このようにAI が現実の物理世界で「認識→判断→計画→行動」することを「フィジカルAI(Physical AI)」と呼びます。さらにその中でもロボットに焦点を当て、ロボットが自律的に「認識→判断→計画→行動」できるようにする技術が「AI ロボティクス(AI Robotics)」です。安川電機は、このAI ロボティクスを軸としたフィジカルAI を活用し、これまで人の手に頼っていた作業の自動化に挑戦するAI ロボット「MOTOMAN NEXT」の社会実装に取り組んでいます。
![]()

Copyright © 2003‐2026 YASKAWA ELECTRIC CORPORATION.
